
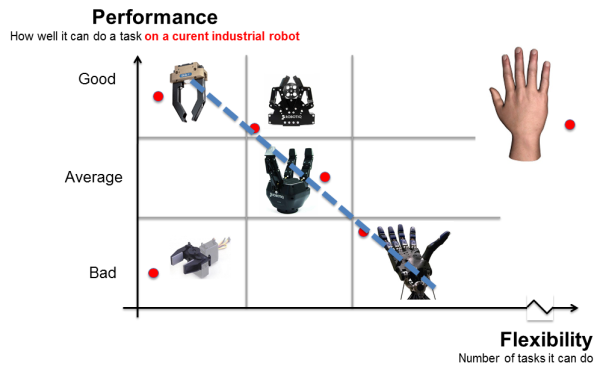
What does Flexibility in Automated Manufacturing Means?
In the industrial automation world, the word flexibility is often used. We’ve heard about flexible robot grippers, flexible...


How to Choose External Maintenance Services for Welding Robots
Maintenance! The most important thing for proper manufacturing and probably the most neglected part of manufacturing...
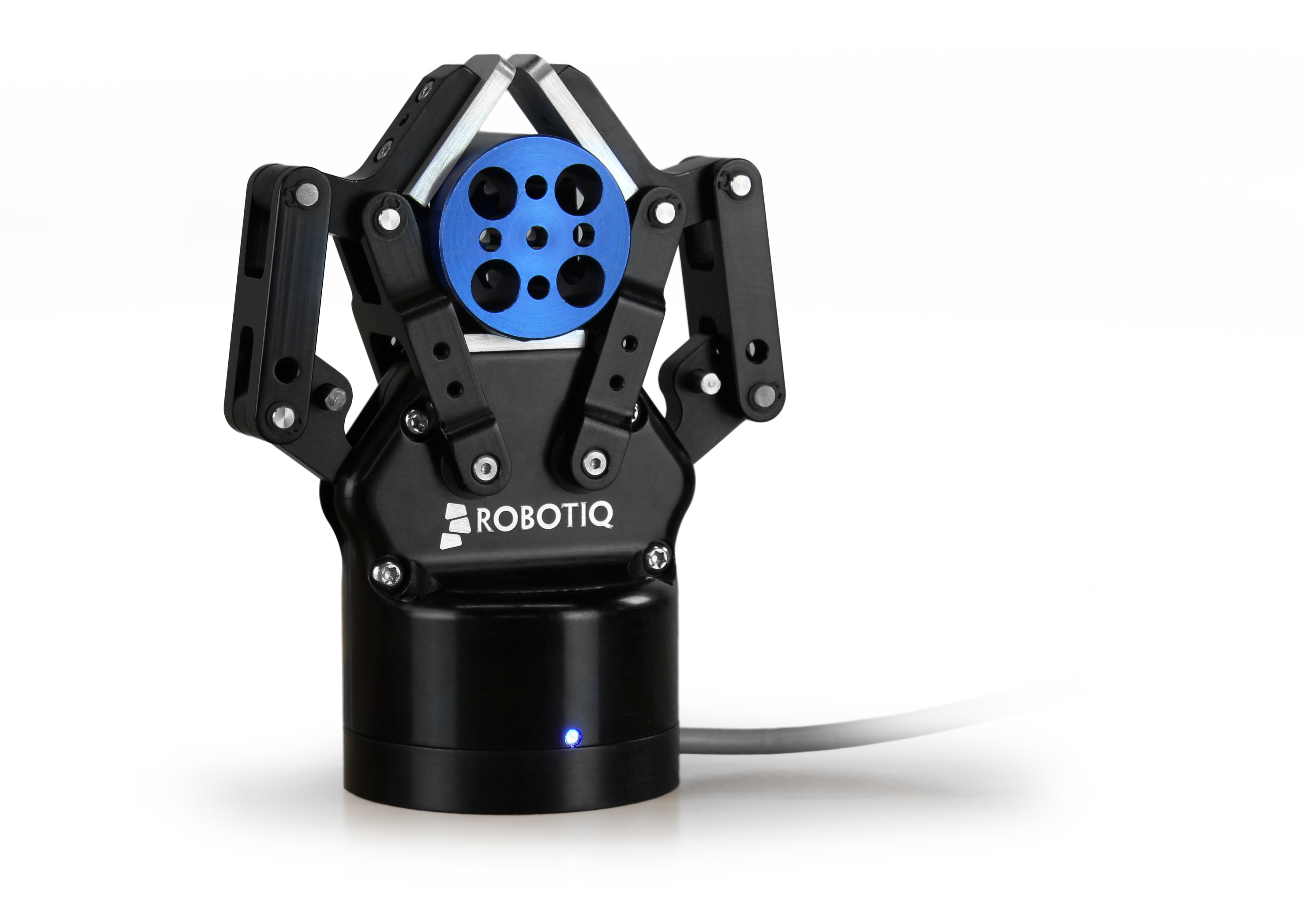
Servo-Electric Gripper: How Does It Work
This article presents an overview on how a servo-electric gripper works. The image below shows the main components of an ...


Robot Force Torque Sensors: Current and Future Applications
Force torque sensors are commercially available in many sizes with various measurement ranges. They provide precious input to...


What are the Present Safety Requirements for Collaborative Robots?
Upgrading the standards to include collaborative robots allowed certain, especially smaller robots, to be unchained from the...


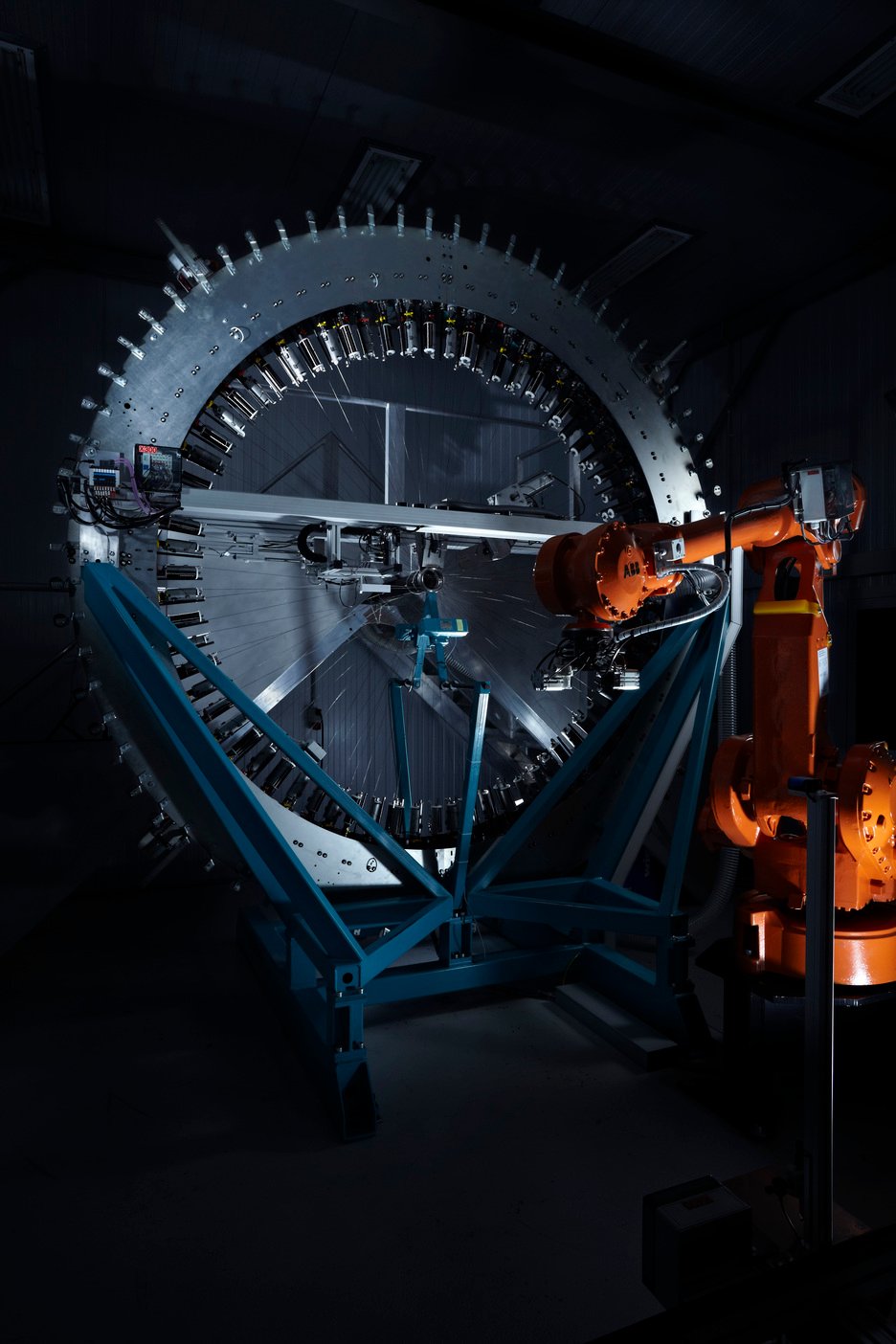
Industrial robots: What are the different types?
An industrial robot commonly refers to a robot arm used in a factory environment for manufacturing applications. Traditional...
Unconventional Robotic Applications in Manufacturing: Road Bike Carbon Frame
These days, robotic applications are becoming popular in every aspect of manufacturing. Processes that were completely manual...

Top 5 Robotic Applications in the Aerospace Industry
The aerospace industry is known to be very conservative. Companies typically use successful assembly methods that have already...

How to Choose the Right Power Source for Robotic Welding Applications
Choosing the right robotic welding power source for your welding application can be confusing. There are not only many...
Leave a comment