
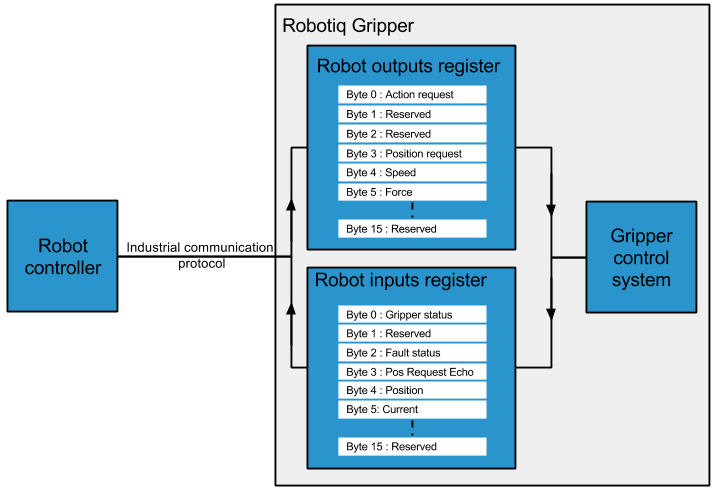
How to Control a Robotiq Gripper
At Robotiq we have been driven by the goal of making robotics integration achievable with the minimum robotics knowledge...

RS485 vs Ethernet: Which One is Most Used in Industry?
While Ethernet is the most commonly used communication protocol among multiple types of devices, ranging from consumer gadgets...
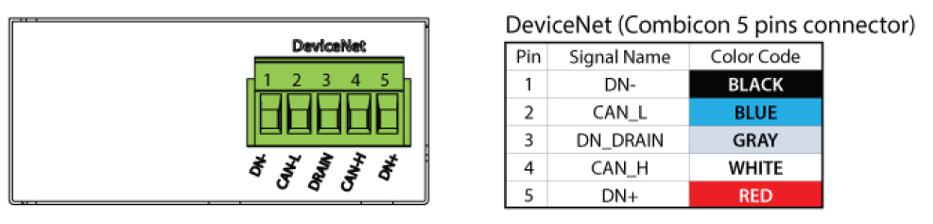
How to Configure a Robotiq Device with DeviceNet Communication Protocol
Robotiq specializes in robotic hardware devices. However, to take advantage of all the toolsavailable to configure your...

What Are The Differences Between Ethernet and Ethernet/IP ?
The following article is written to clarify the confusion between Ethernet and Ethernet/IP. First, if you do not know what the...

Using Modbus TCP on an Industrial Robot Controller
Modbus TCP (also called Modbus TCP/IP) is an open industrial communication protocol used to control devices over an ethernet...

ROS-Industrial: open-source software in industrial robotics
A couple years ago Southwest Research Institute (SwRI) released an open-source software package which brings industrial...

Robot Grippers integrated with Robot Raconteur at RPI
The following video shows two of our Adaptive Grippers controlled by a Matlab interface, which also monitors two Force/Torque...
Leave a comment