
Controlling the Robotiq 2-Finger Gripper with MODBUS Commands in Python
You can create robotic applications from many programming languages, as explored in this post by Alex Owen-Hill titled What is...

Read more 5 min read time
What Are The Differences Between Ethernet and Ethernet/IP ?
The following article is written to clarify the confusion between Ethernet and Ethernet/IP. First, if you do not know what the...

Read more 1 min read time
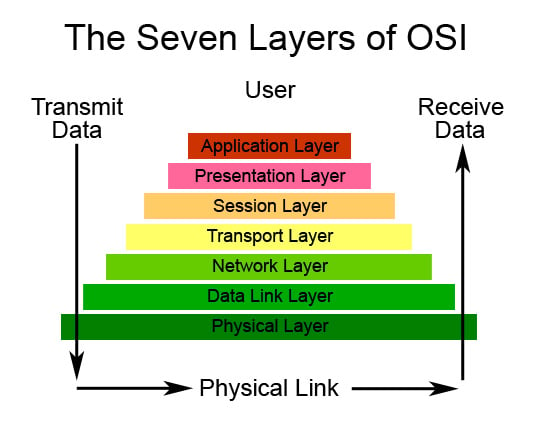
Industrial Robot Communication Protocols
Communication protocols have always been a big challenge for the robotic industry. Protocols are used to exchange data between...

Read more 3 min read time

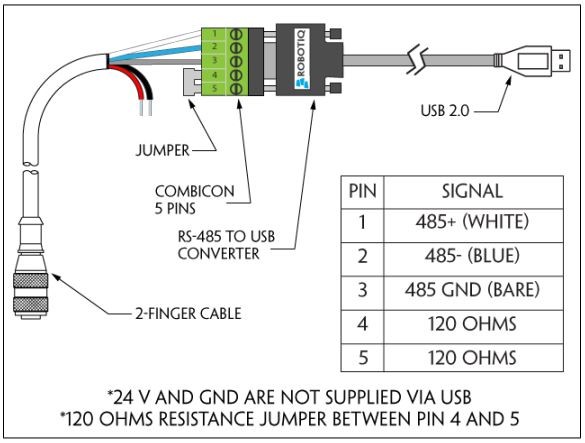
How to Control the 2-Finger Adaptive Robot Gripper?
As explained in a previous article, the 2-Finger Adaptive Robot Gripper is able to achieve both pinching and encompassing...

Read more 3 min read time
Leave a comment