

Challenges of a Vision System for Template Matching
When implementing a vision system it is important to understand what constitutes a challenge for this kind of algorithm. Some...

How to Improve Object Pick-up With Sensors
What's the best way to detect if an object is ready to be picked up? There are various sensing technologies you could use. In...

How Template Matching Works in Robot Vision
What does a robot vision system see when it detects an object on the production line? Computer vision systems have become both...

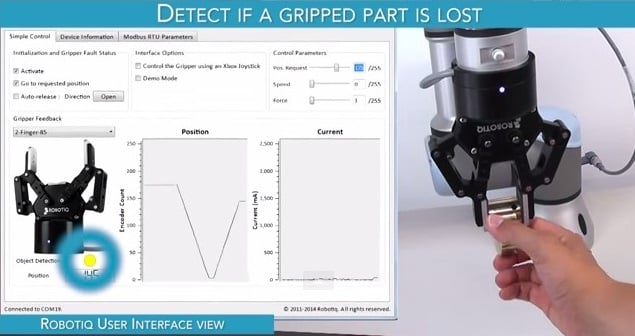
How to use the Object Detection Feature of the Robotiq Grippers
In this video of the Robotiq Support How-To video series, you’ll learn how to use the object detection feature of the Robotiq...


Research Spotlight: Stable Grasping of Unknown Objects
How can you reliably grasp unknown objects and ensure that the grasp is stable? In this post we discuss a new research paper...
Robotiq Adaptive Robot Gripper - New and Enhanced Features
At Robotiq we are always seeking integrated solutions for our end users. As our Grippers can adapt to different geometries, we...

Tactile Sensor and Force Torque Sensor: What's the Difference?
We have previously published a couple articles on the different applications of Force-Torque Sensors and we have also written...

How to Use Object Detection with Robotiq's Adaptive Grippers?
All the Robotiq Adaptive Grippers have a built-in object detection function. In fact, this article will present to you the...

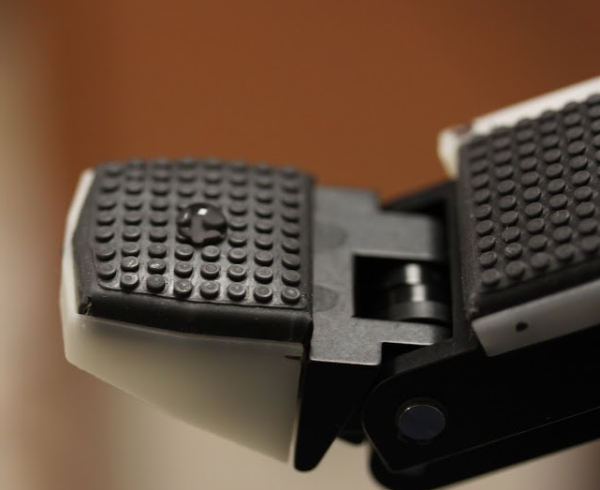
How to Verify Gripper Contact
Both of our Adaptive Grippers are able to grip objects of various shapes using their innovative finger mechanism. This allows...

Leave a comment