

Research Spotlight: Stable Grasping of Unknown Objects
How can you reliably grasp unknown objects and ensure that the grasp is stable? In this post we discuss a new research paper...


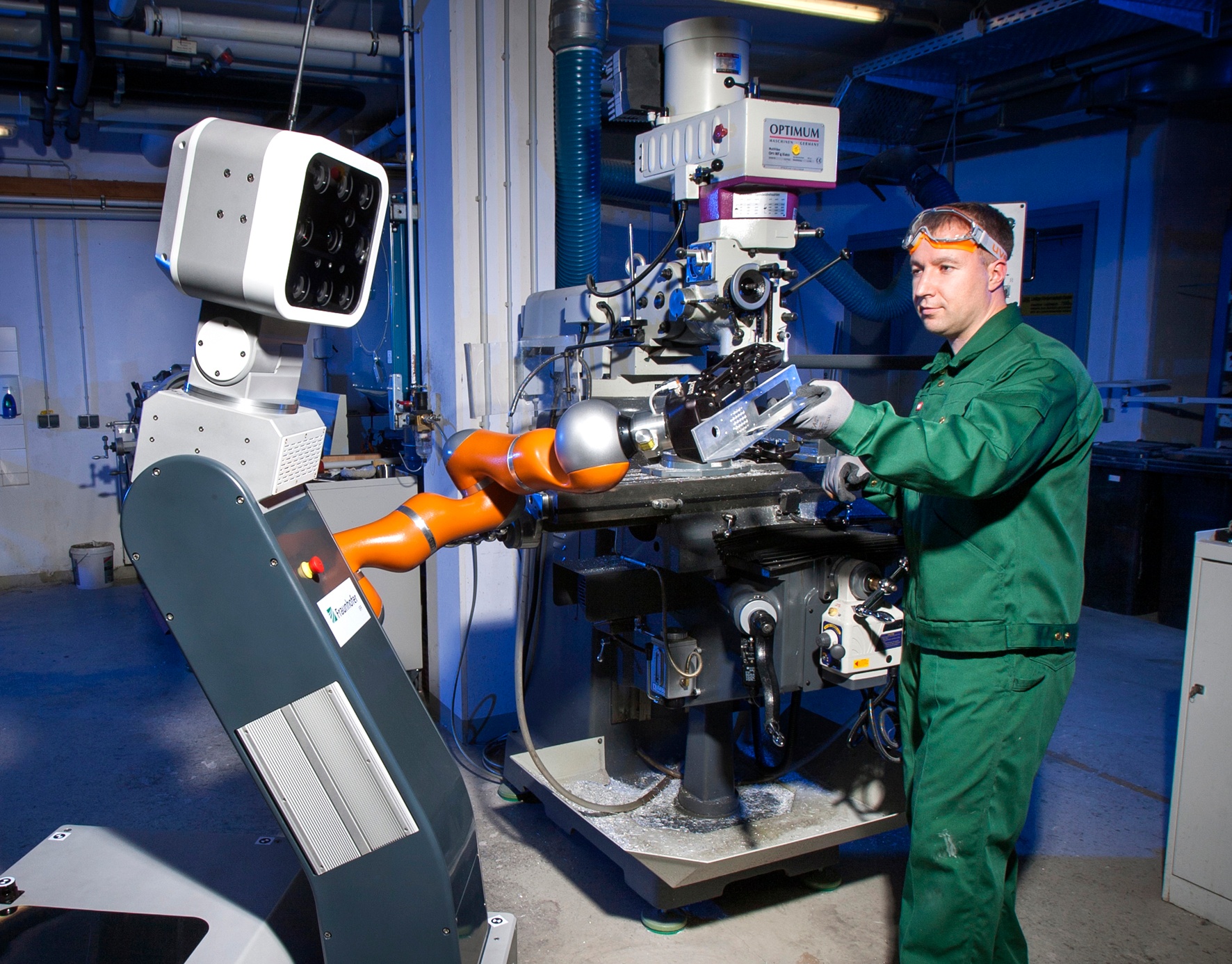
The Next Generation of Robot Manipulators
What is THE end effector of the future? Is there a specific end effector that will be able to grasp everything? From car doors...

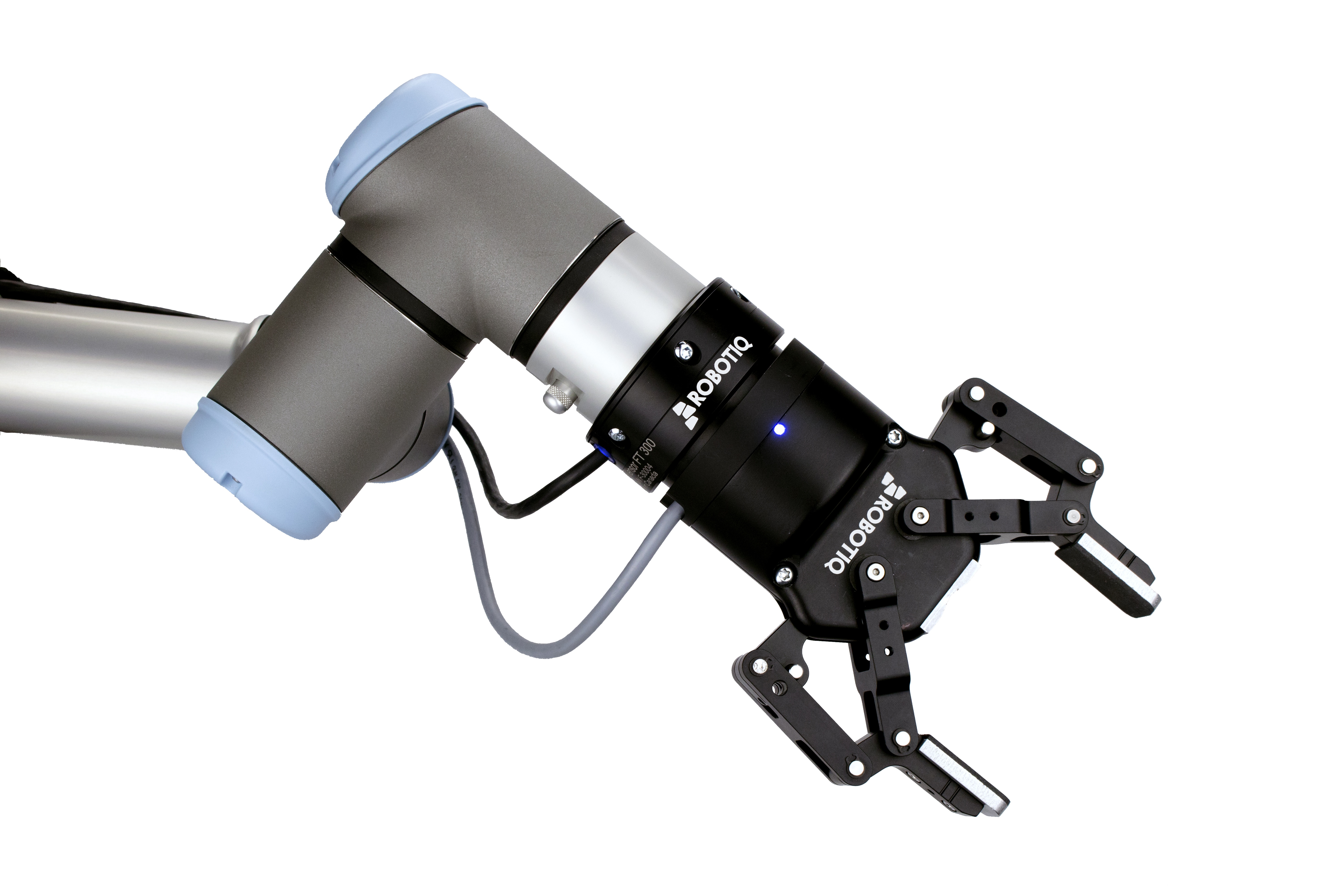
Robotiq Releases its New Force Torque Sensor, the FT 300
Robotiq launches its newest Force Torque Sensor: the FT 300, bringing a sense of touch to your robot. With plug and play...
ANNIE is Coming on Strong !
Unfortunately, we sometime lose track of all the interesting things our Grippers are doing. In fact, we sell them, they go on...
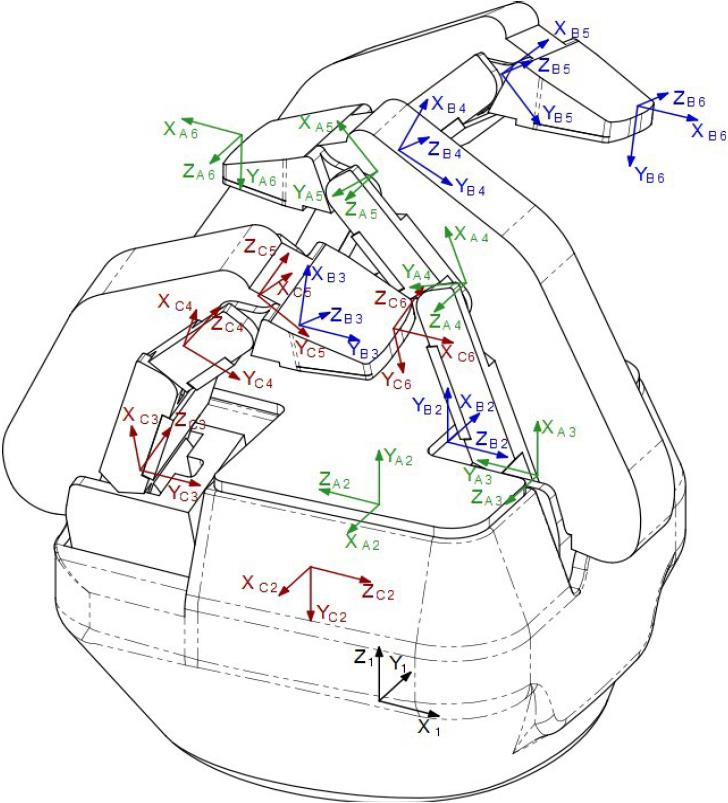
How to Calculate a Robot's Forward Kinematics in 5 Easy Steps
Calculating the Forward Kinematics is often the first step to using a new robot. But, how do you get started?
While there are...

Which Robot Gripper is Easier to Integrate ? Part 1 - Selection Process
There are very few people that will quantify the money spent on a process. In fact they will most likely spend the least amount...
How Our Clients Are Moving Robotics Forward
We are really lucky to have customers from around the world that are pushing the boundaries of robotics. I would like to...

How Many Fingers Do You Really Need for a Robot?
Why do we humans have 5 fingers on each hand? It’s a question which you probably rarely think about. But, as roboticists, it’s...
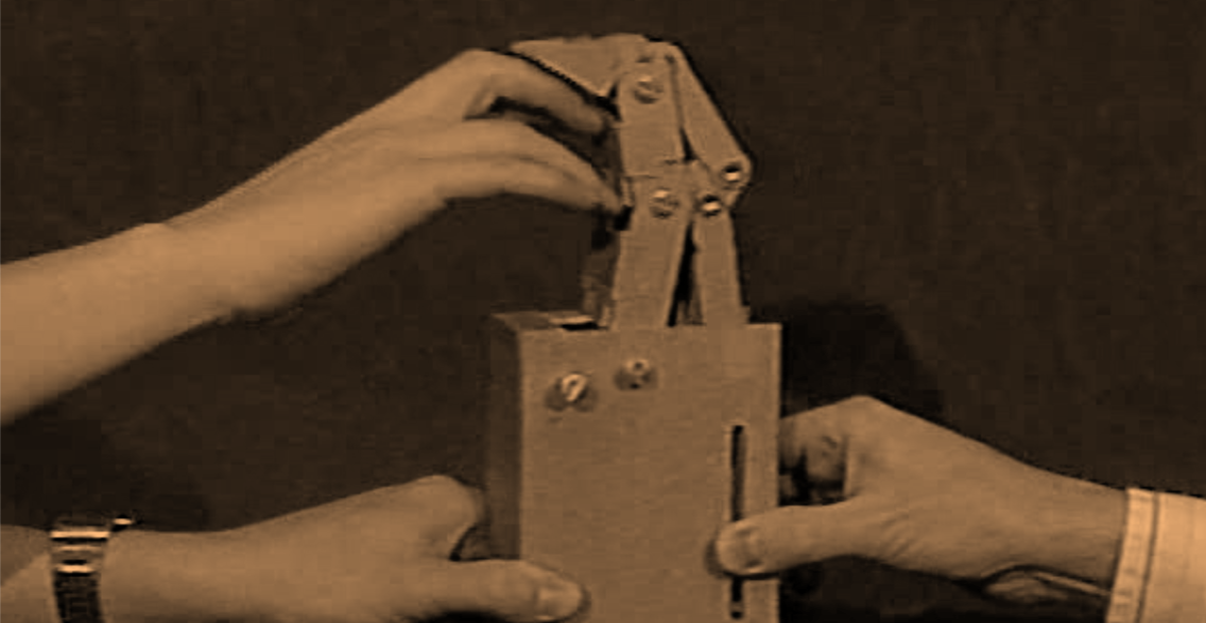
3-Finger Adaptive Robot Gripper History
Robotiq is a spin-off from the Laval University Robotics Lab. At the time, the 3 co-founders were not quite sure that...
Leave a comment