
Why You Should Set Your Robot Payload ?
Payload, grip force, weight, reach are all data that are used to describe and differentiate robots from each other. Payload is...

Programming a Robot is as Easy as 1-2-3 !
''Robots are complicated'', ''You need to have an experienced technician to operate them'', ''We are not using robots, it is...

Why Robots Will Always Need Us?
I was at the airport the other day looking at planes coming in and something surprised me. One plane came in with one of its...
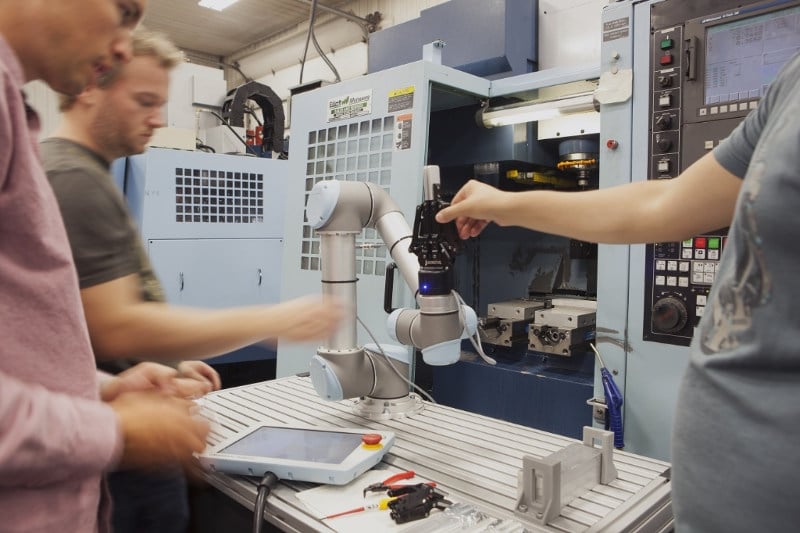
Easy to Program the Collaborative Universal Robots
The introduction of collaborative robots has brought two major improvements: safer human-robot collaboration and robot...
Machine Learning: Robot PhDs
Over the last few decades, robot manufacturers have been struggling to develop robots that will be easy to program. With the...
The Future of the Robot Teach Pendant
As we have seen a lot of improvements in the robotic market over the last few years, some may ask; 'What's next?'. In fact,...
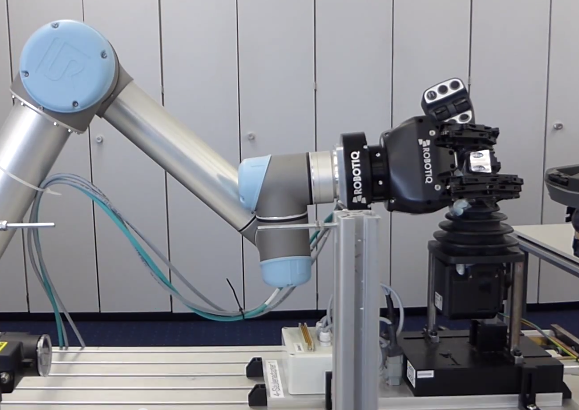
Robot Accuracy and Repeatability in Off-line Programming
This is a short introduction to the importance of robot positioning accuracy, which includes position and orientation...


ROS Package for Robotiq Grippers
In the last couple of months we have noticed an increased interest in the ROS package for the Robotiq Adaptive Grippers. This...
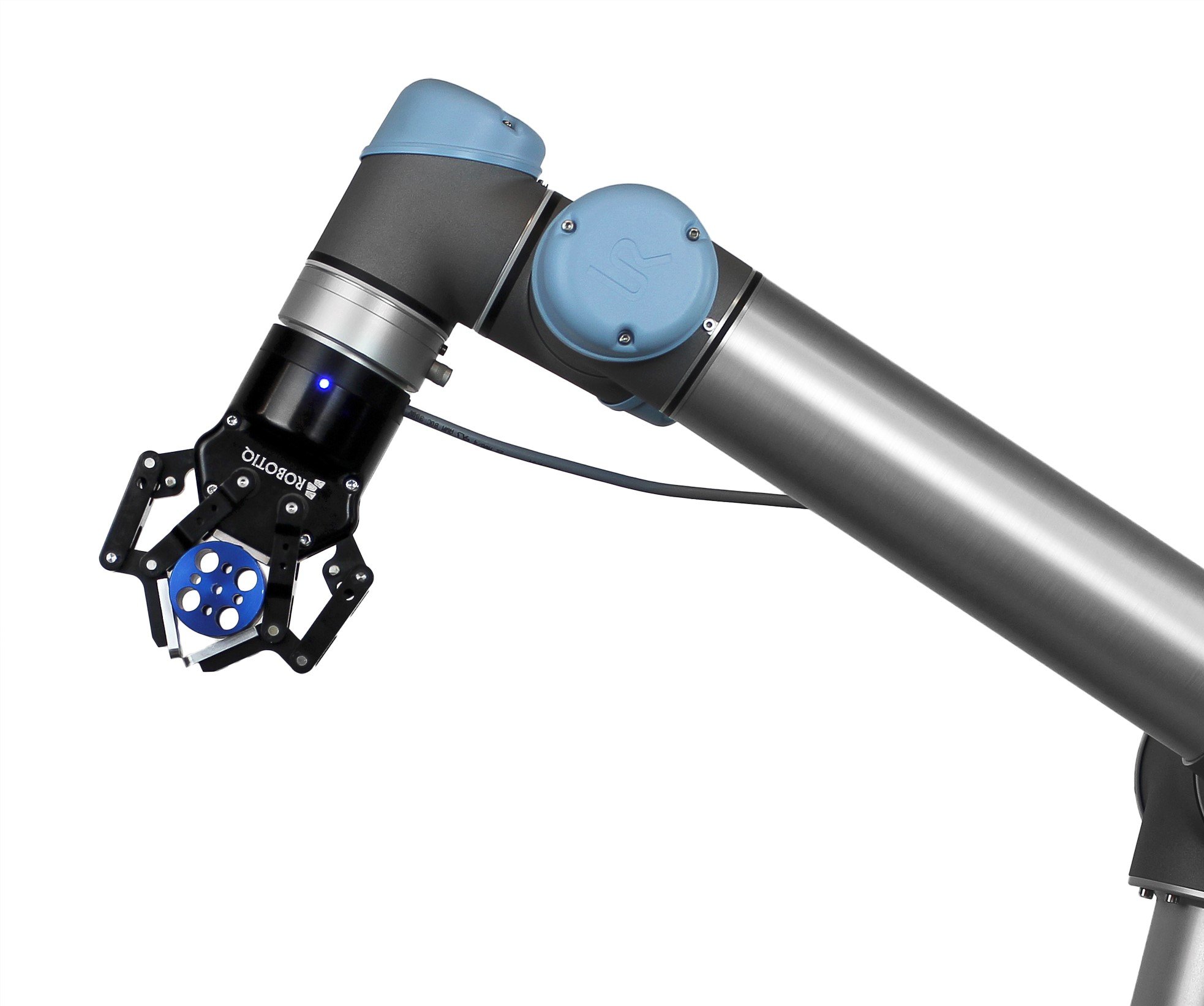
How to Create Fast Cycle Times with the Adaptive Robot Gripper?
One of the advantages of a servo-electric robot gripper is that it allows you to control the position of the fingers. If the...

Leave a comment