
Tactile Sensor and Force Torque Sensor: What's the Difference?
We have previously published a couple articles on the different applications of Force-Torque Sensors and we have also written...

Part Feeding and Robot Gripper Choice
In the past weeks I've published articles on the different things you need to check when buying a robotic gripper. The first...
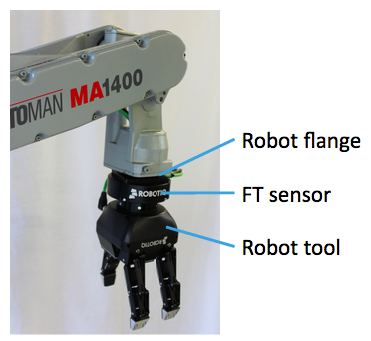
Robot Force Torque Sensor - How does it work?
We recently release an article on ''What is a Force-Torque Sensor''. Now that you know what a FT sensor is, we thought that...

Robotic Welding for Fabshop - Rapid-Line Case Study
Fabshop are an important link in the manufacturing chain, working behind the scenes to build components for several objects...

Easy Robotic Welding at IMTS in Yaskawa Motoman Booth
IMTS (International Manufacturing Technology Show) is held in Chicago this week. Our Kinetiq Teaching technology is being...
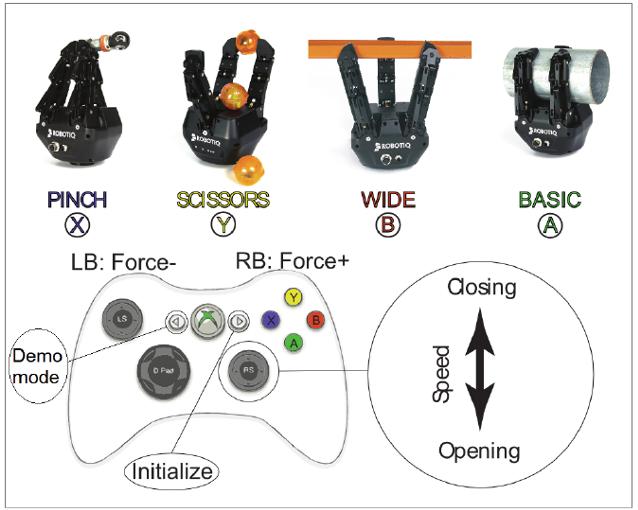
How and why you should use the Robotiq User Interface
Even if Robotiq is basically a hardware provider for the robotic industry, you should know that Robotiq provides a software...
Robot Accuracy and Repeatability in Off-line Programming
This is a short introduction to the importance of robot positioning accuracy, which includes position and orientation...

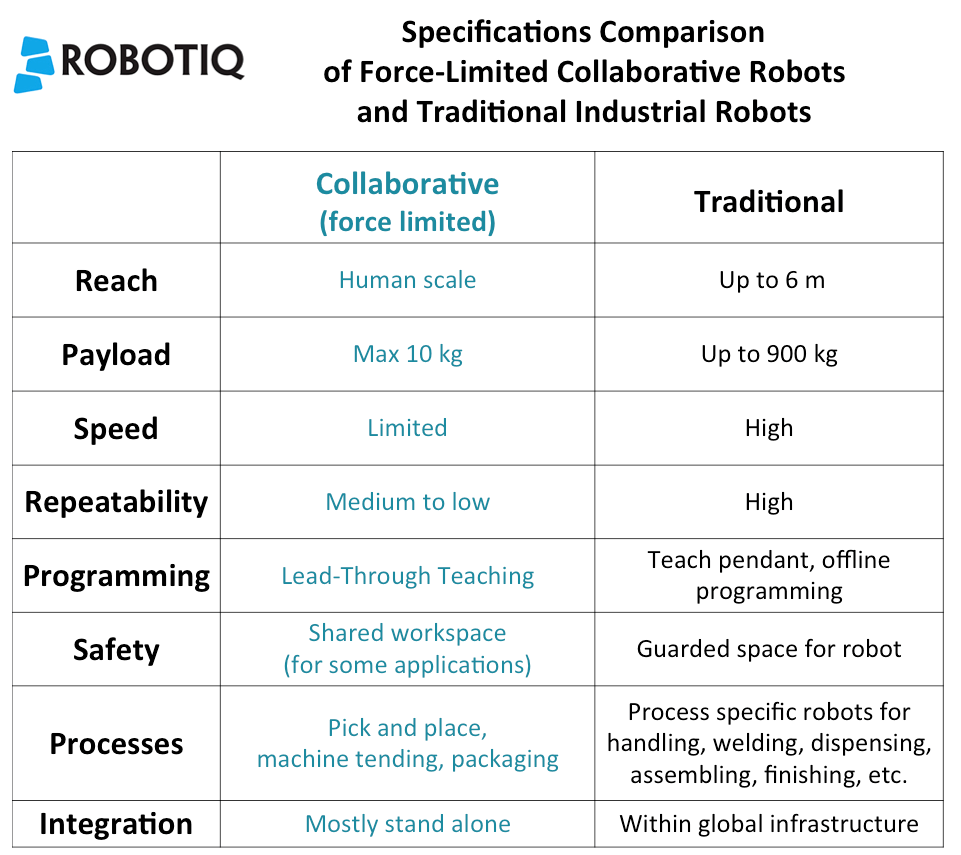
Grippers for Collaborative Robots VS Grippers for Industrial Robots
The force-limited collaborative robots are robots that can work side-by-side with human workers. The most prominent examples...


Robot Force Torque Sensor - An Introduction
Robots are frequently used because of their rigidity. Most applications need rigidity to accomplish the precision necessary in...
Leave a comment