

In the past weeks I've published articles on the different things you need to check when buying a robotic gripper. The first was regarding the parts/objects that the robot has to handle, but also the process involved. As I introduced the part feeding aspect of a pick and place process a little bit, I thought it would be great to go a little further into this subject.
Sometimes picking the part is not the problem but rather accessing them.
The pick and place process has to be split into 2 different operations: the pick and the place (brilliant!). But seriously, you need to consider the space or environment you have or will have during this process on both side of it. Some people only consider the pick operation and forgot to think about the final operation. I admit that most of the time, the pick operation is more difficult and can create a stronger headache, but you'll have to consider the dropping/placing operation as well to complete your reflexion.
Once you have divided your process in two, there are basically 4 different scenarios that can occur. Here is a list of these scenarios beginning by the easiest to the toughest for the pick it part of the operation.
Ordered, with spacing
 This configuration is the easiest you can ever imagine in a robotic pick and place operation. You can picture this operation as a flat surface with parts being deposed in an assigned space. The parts will always be in the same spot whatever the situation. Why is this easier than other scenarios. It is quite simple; there are no adaptations! The robot has to to go to the very same spot or go through the array of parts again and again. Once all the parts are picked, the robot just starts over and goes to the exact same coordinates. Most of the time, these operations don't need vision. A simple gripper and robot, with a good repeatability, can be used. As you can see in the picture, the robot gripper will have plenty of space to grasp the parts. The spacing between the parts is adequate and the center of the parts will always be at the same spot as the production goes on and on.
This configuration is the easiest you can ever imagine in a robotic pick and place operation. You can picture this operation as a flat surface with parts being deposed in an assigned space. The parts will always be in the same spot whatever the situation. Why is this easier than other scenarios. It is quite simple; there are no adaptations! The robot has to to go to the very same spot or go through the array of parts again and again. Once all the parts are picked, the robot just starts over and goes to the exact same coordinates. Most of the time, these operations don't need vision. A simple gripper and robot, with a good repeatability, can be used. As you can see in the picture, the robot gripper will have plenty of space to grasp the parts. The spacing between the parts is adequate and the center of the parts will always be at the same spot as the production goes on and on.
Non-ordered, with spacing
This configuration is basically where the parts are placed on a surface without any specific ordering, but they have plenty of space between them to be able to grasp a portion of the part. This is where it is getting a little tougher to integrate a robotic gripper. In fact, since the parts are not ordered, it makes it hard to predict how you are going to grasp them. Depending on the shape of the parts, you should be able to predict what side of it will be face up. Even though, there is still some uncertainties regarding the way to grasp it. To resolve this problem, you can use an Adaptive Gripper that can grasp a part depending of its configuration. Paired with a vision system, the gripper knows where the part is and what is its configuration. The robot controller/program can then analyze the different scenarios it was taught and respond with a motion according to these scenarios.
Ordered, without spacing
 This configuration means you know where the parts are, but it is harder to grasp them. For example, the parts are ordered very close to each other or they are in a deep container. For this scenario to work, the choice of gripper is essential. The gripper has to be small enough to go in-between the parts and should have a variable opening so that it can partially open when other objects are close to it. When a layout is tight, you could also consider grasping the part by an internal feature (internal diameter, for example). And you might also consider buying personalized fingertips for your gripper. This could give you the supplementary reach you need for your application.
This configuration means you know where the parts are, but it is harder to grasp them. For example, the parts are ordered very close to each other or they are in a deep container. For this scenario to work, the choice of gripper is essential. The gripper has to be small enough to go in-between the parts and should have a variable opening so that it can partially open when other objects are close to it. When a layout is tight, you could also consider grasping the part by an internal feature (internal diameter, for example). And you might also consider buying personalized fingertips for your gripper. This could give you the supplementary reach you need for your application.
Non-ordered, without spacing (a.k.a. Random Bin Picking)
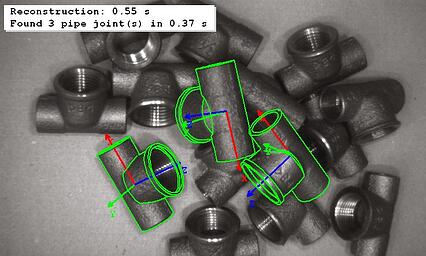 Random bin picking is the most complex of the scenarios. In fact, there are now ways you can predict how a part is going to be presented to the robot. When trying to predict random placement, the use of a vision system is an obligation. Even though choosing a gripper for this type of application is still difficult, by selecting an adaptive gripper, you can adapt the motions you will need depending on the situation you are facing. Since all the picking operations will be different, you want to have a gripper that can grip it all. As you can see in the picture, the vision system is able to figure out what the orientation of the parts is, although, your set up might not allow you to pick the part as you might want to. With a self-adaptive gripper you can have a couple of options for a same scenario compared to other grippers that have only one way to grasp.
Random bin picking is the most complex of the scenarios. In fact, there are now ways you can predict how a part is going to be presented to the robot. When trying to predict random placement, the use of a vision system is an obligation. Even though choosing a gripper for this type of application is still difficult, by selecting an adaptive gripper, you can adapt the motions you will need depending on the situation you are facing. Since all the picking operations will be different, you want to have a gripper that can grip it all. As you can see in the picture, the vision system is able to figure out what the orientation of the parts is, although, your set up might not allow you to pick the part as you might want to. With a self-adaptive gripper you can have a couple of options for a same scenario compared to other grippers that have only one way to grasp.
At the end of the day, the part feeding process has to be identified and you need to choose your gripper with regards to your specific configuration. So what you have to remember concerning the end effector is that a self-adaptive gripper can take the fullest advantage of the information from a vision system. And then don't forget you need to look at the placement of the parts you have just picked.





Leave a comment