

Even if Robotiq is basically a hardware provider for the robotic industry, you should know that Robotiq provides a software support program with all the grippers. In fact, this software will help you to configure, troubleshoot and test your gripper. It is the easiest way to learn and experience the different motion of the robot and to try gripping position with the gripper on your desk. This article will give you the basics of the Robotiq User Interface (RUI). By using this software, you will reduce your setup time by setting your parameter before installing the gripper on the robot. You will also be able to reduce the
Testing
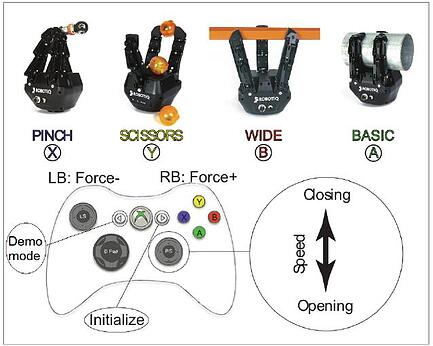
With the RUI, you can execute all the different motion of the grippers. If you use a 3-Finger Adaptive Gripper the pinch, scissor, basic and wide mode can be test. All the grippers are speed and force controlled, which means that you can test if the speed of the gripper is appropriate for your application and set it afterward in your robot program instead of trying it once the gripper is in its working cell. The same thing can be applied for the force, in fact, if you carry fragile items, you may want to test a couple of different forces before launching the robot.
Troubleshooting
It is unfortunate, but troubles can occur with robotic devices. As you want to reduce your downtime when there is a problem, use the RUI to read the different error codes. By using the Robotiq User Interface, it makes it easy for the Robotiq support department when you need to contact them. If a particular problem appears and cannot be solve using the RUI, please contact the support departement for further information and feel free to give us a call.
Demo
If you need to do demonstrations with the Robotiq grippers, you should use the RUI paired with an wireless Microsoft Xbox remote control. This package can be buy in our product list.
How to use the RUI software
Configuration
The gripper can also be configure using the RUI. In fact, IP address and communication protocol can be change or configure using the software.
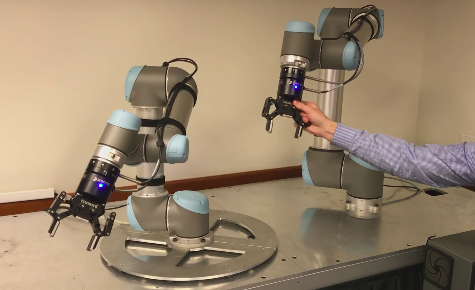
First of all, in case of a 3-Finger Adaptive Gripper, the end-effector can be connected directly into your PC via a USB cable. In case of a 2-Finger Adaptive Gripper (either 85 or 200) the gripper should be connected to the controller and the controller should be connected to your PC via USB. By using this connection, you are making sure that there is no communication protocol conflict. Just make sure to install the configuration program (Robotiq User Interface Setup.exe) and follow the different installation steps when downloading the RUI This will configure your USB port and it will recognize what is connected to it.
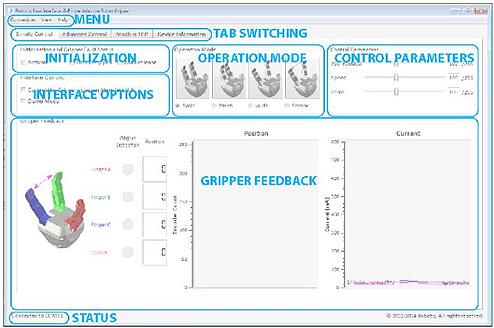
To recognize your gripper you can either search for its address or do an ''auto-search'' and the program will search and find what is connected to the PC. When you enter into the RUI, the top tabs allows you to do ''Simple Control'' which refer to direct operation that you can do with the gripper initialization, open/close fingers, set speed and force, etc. In this tab you can also see the graphs representing the feedback of the gripper.
The ''Communication Protocol Configuration'' top tab allow you to configure the different address of the gripper. Note that the tab has the name of the communication protocol you are using. This tab give you the different address and ID for the programming of the end-effector. You should note that every communication protocol has different configuration parameters and should be treated differently. When the configuration is done, confirm the modifications with the apply button and follow the steps.
The device information tab, gives you information on the gripper and firmware version of your setup.
The view tab the very top of the interface can give you information on the error codes. In fact if there is a issue with the gripper, for example, the collision code will be stored in this register and you will be able to read it and fix the problem.
This is an overview of the software that Robotiq is offering to its users. You should definitively go take a look at the RUI instruction manual on the support section of our website. Hopefully this article gave you a better idea of what the RUI was and how to use it.



Leave a comment