

Magnetic Robot End Effector: Top 5 Pros and Cons
There are different types of robot end effectors. The most common are pneumatic grippers, because they are simple and low...

How Pneumatic End Effectors Work?
neumatic grippers are mechanical devices that are really common in automated manufacturing processes. Combined with a robot...

5 Factors to Consider before Buying a Robot Gripper
When you are designing your robotic cell there are a lot of details that you need to consider. You want to maximally increase...

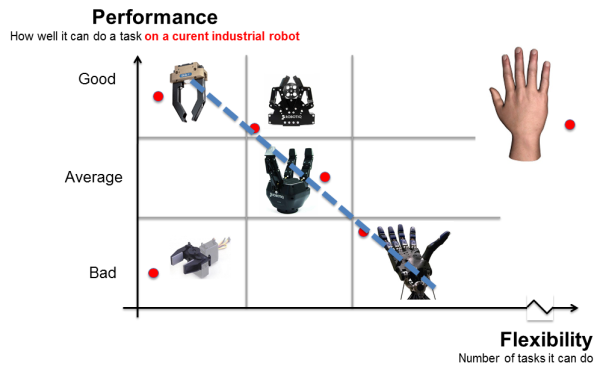
What does Flexibility in Automated Manufacturing Means?
In the industrial automation world, the word flexibility is often used. We’ve heard about flexible robot grippers, flexible...

How Do Industrial Robots Achieve Compliance
In industrial robotics, the term compliance refers to flexibility and suppleness. To define what compliance is, the definition...

Integrated Tactile Sensors for Robotic Gripper from ETS
Several members from the École de technologie supérieure (or ETS) in Montreal have been working on tactile sensors which they...


Robotic End Effectors - Payload vs Grip Force
The difference between payload and grip force is often misunderstood. Since the selection of these two parameters for robots...

DLR & KUKA: Grasp Planning & Control with the 3-Finger Robot Gripper
Many companies are interested by the adaptability of Robotiq’s Grippers. They want to experiment with it, and integrate it...
Leave a comment