

At Robotiq we are always seeking to make life easier for our customers. We work hard to include new features on our Grippers or devices that answer the feedback from end-users and distributors. Recently we came out with a new controller (Universal Controller) for our 2-Finger Adaptive Gripper-85. It is actually the exact same controller that the 2-Finger Adaptive Gripper-200 is using. With this new fit we wanted to unify our Gripper's control method. So we have decided that the Universal Controller will be able to be used on the next generation of the 2-Finger Adaptive Gripper-85, the present and next version of the 2-Finger Adaptive Gripper-200, as well as with Kinetiq Teaching. The following article will give you the main upgrades and advantages of the Universal Controller when used with our Robot Grippers.
What is going on?
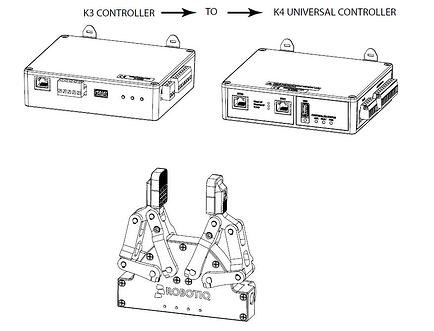
As uniformity and simplicity are a priority for us, we determined that having one controller that works for 2 different Robot Grippers would be the easiest way to simplify your Gripper use and our production process at the same time. In fact, if you are already using a 2-Finger Adaptive Gripper-85, nothing will really changing for you. Regardless of whether or not you are experiencing issues with your present controller or if you simply want to upgrade it, we will send you this new generation controller. Some really interesting upgrades have been included which should simplify your Gripper use. Make sure you read the swap document and insure your connections are adapted for the new Universal Controller. Take note that the older controller version is no longer being produced.
If you already own a 2-Finger Adaptive Gripper-200 and you want to switch and add a 2-Finger Adaptive Gripper-85, the same controller can be used.
Upgrades
Upgrades have been made for this new Universal Controller, so it is important to consider them before using it with your Robot Gripper.
-
Emergency Stop: The supply wiring has changed from a 3 pin Combicon to a 5 pin Combicon to introduce a protective or emergency stop. This allows you to stop the current that is going to the Robot Gripper once you activate the emergency stop on the robot. In other words, when you press the emergency button, all devices on the robot are shut down instead of being independent from each other.
This mechanism increases the security level of the Gripper by connecting the robot and end-effector together. This reduces the risk of accident, in fact you don’t want the Gripper to be supplied with current once your robot is stopped.
-
Communication Protocol: ProfibBUS and ProfiNET communication protocols have been added to the controller. An Ethernet port has also been added to the Universal Controller. And lastly, the CANopen communication protocol connector has been switch from a 5 pin Combicon to a D-SUB9 connector.
-
Visual Interface: A LED indicator light has been added to the Universal Controller interface to help you visualise what is happening in real time. The USB port is now equipped with a LED to show if there is transmission with the USB host.
-
Enhanced Feedback: The number of registries in the controller have been enhanced to allow more feedback information on the Gripper status.
Once again, make sure to go through the swap document that is sent with the Universal Controller to make sure your connection is correct for this new generation of controller. These changes were designed to give you more tools to have a safer working environment and better feedback on the Gripper. We hope you will find these changes helpful. Remember it is because of your feedback that we have implemented these changes, so if you have other suggestions we are always open to hearing them, just leave a comment or contact our support team.







Leave a comment