

The DARPA Robotics Challenge took place Friday and Saturday, December 20-21st, at the Homestead-Miami Speedway in Florida. The environment was perfect and the 17 Robotic teams took over the garages where the race cars are normally stationed. Teams from the US, China, Japan, and Korea participated. There were tents set-up as you entered the site, some showcasing different products like the Google self-driving car, First Robotics (competitions for kids), NASA's Chariot Rover, or Hazmat equipment and demonstrations. For the tech minded it was a gourmet selection of cool stuff! Four teams were using our 3-Finger Adaptive Robot Gripper.

The Trials
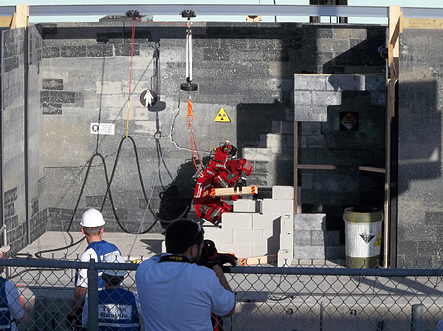
Then the trials began and the excitement built. Each team was required to attempt the 8 tasks under less than ideal communication conditions, which was purposely maintained to imitate what might be real life conditions in an emergency situation.
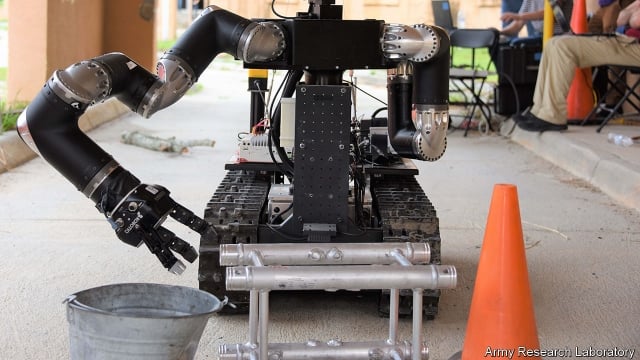
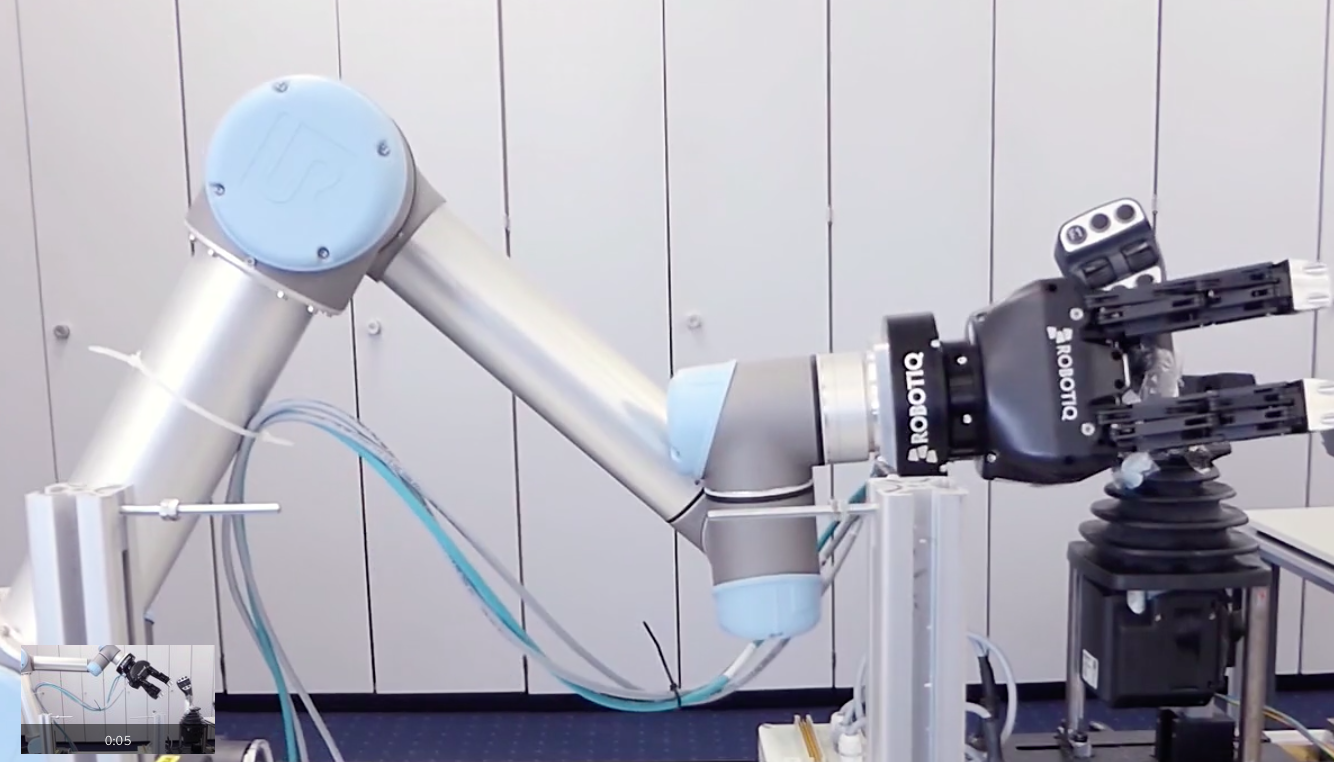
Each task required different functionality from the robot end effector, so sometimes the teams would change their robot end effectors, but several teams kept our Robotic hand(s) throughout the competition, which is a testimony to the Grippers flexibility. Carnegie Mellon University's Business Development Director, Steve DiAntonio said: “We definitely picked the right hand in terms of dexterity and strength. We are very happy with the way it has performed.” Their team came in third with CHIMP using Robotiq's 3-Finger Adaptive Gripper for all the tasks.
The team for Worcester Polytechnic Institute only had one robotic gripper from Robotiq on their robot, but I distinctly got the feeling that it wasn't necessarily a choice, but more of a funding limitation, as according to Daniel Miller, who was the tech person responsible for the gripping tasks, “The hand did everything we expected and I would love to have another Robotiq hand for our robot. Also, loved that the fingerpads were customizable.”

There wasn't really a lot of time to prepare for this competition which began in October 2012, so a little over a year. Russ Tedrake, co-leader of the MIT team, who came in fourth in the competition said: “Just a few weeks before the competition the rules were changed, so we didn't have a lot of time to really set-up the hand, but will probably be using it going forward, because it has great simplicity and durability and can take whatever you can throw at it.”

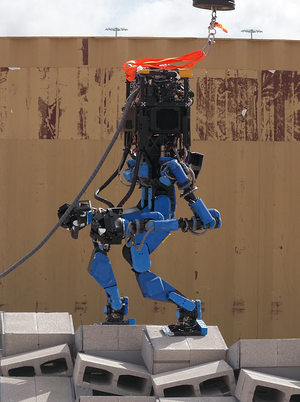
The Schaft team which is a spin off of Tokyo University and which was just recently taken over by Google and who came in first also used the Robotiq 3-Finger Adaptive Gripper. Of course, there are many components and many screaming hours that go into setting up such complicated robots and they are never quite finished even when the task has begun, so special kudos belong to all the teams who competed.
Three of the top four teams (SCHAFT, Tartan Rescue, MIT) won using the Robotiq Adaptive Gripper and WPI (WRECS) also did very well placing 7th. That means that all four teams using our robot grippers in the challenge are in the top 8 and therefore qualify to move on to next year's final with DARPA funding.
Congratulations to all!




Leave a comment