

 DARPA Robotics Challenge is held with the idea of generating research and development of robotic technologies that could be used in the future to overcome disasters. The teams have to design robots and make them accomplish specific tasks that are most likely to be done in disaster response operations. There are different steps in this competition that will last over a year. Last month, we learned that Carnegie Mellon University was selected to get funding support from DARPA for the next step of the Challenge. Their robot named CHIMP for CMU Highly Intelligent Mobile Platform is designed with Robotiq’s 3-Finger Adaptive Grippers as hands. Robotiq is therefore proud to be a part of this challenge.
DARPA Robotics Challenge is held with the idea of generating research and development of robotic technologies that could be used in the future to overcome disasters. The teams have to design robots and make them accomplish specific tasks that are most likely to be done in disaster response operations. There are different steps in this competition that will last over a year. Last month, we learned that Carnegie Mellon University was selected to get funding support from DARPA for the next step of the Challenge. Their robot named CHIMP for CMU Highly Intelligent Mobile Platform is designed with Robotiq’s 3-Finger Adaptive Grippers as hands. Robotiq is therefore proud to be a part of this challenge.
The next step of this competition is the DARPA Robotics Challenge Trials. In this step, the competing robots will have to perform 8 different tasks that can be related to a disaster scenario. Here are the details of the 8 timed tasks.
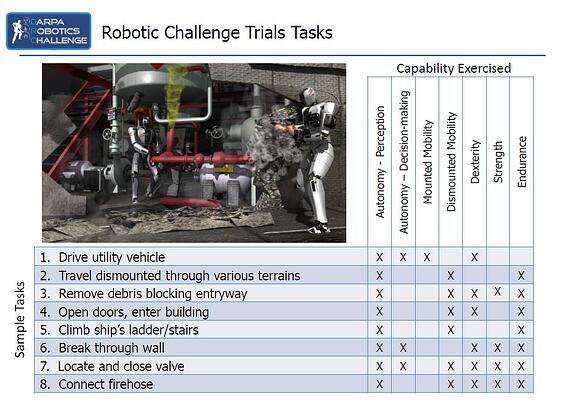
Drive Utility Vehicle
 Each robot will have to drive a XP900 Ranger from Polaris. Safety features have been added for this purpose such as a speed limit of 10 mph and a remote E-stop. It has a payload of 450 kg (1000 lbs). The steering wheel can be tilted for more leg clearance. The bench seat will allow the robot to sit in the middle of the vehicle while driving, if necessary. These are the principal characteristics that the team will need to consider for the vehicle. Then, the robot will have to drive it through a 76.2 m (250 ft) long path with obstacles.
Each robot will have to drive a XP900 Ranger from Polaris. Safety features have been added for this purpose such as a speed limit of 10 mph and a remote E-stop. It has a payload of 450 kg (1000 lbs). The steering wheel can be tilted for more leg clearance. The bench seat will allow the robot to sit in the middle of the vehicle while driving, if necessary. These are the principal characteristics that the team will need to consider for the vehicle. Then, the robot will have to drive it through a 76.2 m (250 ft) long path with obstacles.
Travel Dismounted
Then, the robots will have to cross an increasingly complex terrain. The path is constructed with a lot of different obstacles such as: flat concrete blocks and astroturf, pitch ramps, footfalls and holes, step-over obstacles. The terrain is 24.4 m (80 ft) long and is made of 10 different sub terrains of 2.4 m (8 ft).


Remove Debris Blocking Entry
The next challenge the robots will encounter is a door blocked by debris. They will have to remove each debris to be able to reach the door. Each team will receive samples of the obstacles and instructions about how to position them. The samples are very representative of the real test. The debris can weigh between 2.2 kg (5 lbs) and 4.4 kg (10 lbs).

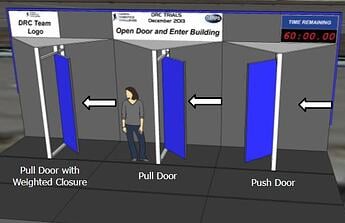
Open Door, Enter Building
The robots will also have to open different types of doors. There will be a push door, a pull door and a pull door with a weighted closure. All the doors have lever handles.
Climb Industrial Ladder
The ladder that the robots will need to climb has a 60 degree incline, is 80 cm (32 in) wide and has a 2.4 m (8 ft) elevation. The step depth is 10 cm (4 in) and the step height is 30 cm (12 in). This ladder was inspired by the stairs found inside the Fukushima-Daiichi plant that was impossible for conventional robots to climb.

Fukushima-Daiichi plant stairs
Break Through Wall
The robots will also have to break through a wall using the tools of their choice. There will be a Rotary Tool (i.e. Dewalt 18V Cordless Cut-Out Tool), a Multi-Tool with Trigger (i.e. Ryobi P340 18V Cordless Job Pil) and a Two Handle Drill and Bit Saw (i.e. Skil 2895 18V Cordless Drill). Every tool will be cordless and powered by battery. They will weigh less than 5 kg (11 lbs). There will also be 2 different wall types (drywall and hardie-board). The robots will have to breakthrough the walls by cutting out geometric forms such as a circle or a triangle with an approximate size of 60 cm (2 ft).

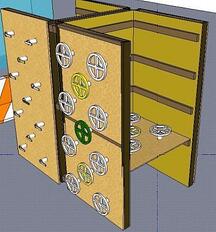
Locate and Close Valves
The competing robots will have to demonstrate their ability to close different size valves, either handwheel or lever. They will be mounted on a vertical wall, as well as on a horizontal shelf. The height of the shelf can be 30, 60, 90 or 120 cm (1, 2, 3 or 4 ft) tall.
Carry, Unspool, and Connect Fire Hose
The last task can by far be the most difficult. The robots will have to pick up a fire hose, bring it to the fire hydrant and connect it. The hose can be positioned at different places on the wall so the robots will have to locate it first. Also, the fire hydrant will be on a pallet so it can be moved around. The final position of it is unknown, so the robot will have to locate this too.
The 8 tasks of the Trials will occur in December 2013 and the winners will be provided with continued funding by DARPA for the last step of the challenge in 2014. The final prize for this challenge is about 2 million dollars. So even though the Carnegie Mellon University Team has their work cut out for them, Robotiq is looking forward to seeing how CHIMP performs and how our 3-Finger end effectors will help.
Related Article: Robotiq Featured at the DARPA Robotics Challenge




Leave a comment