

Robotiq is ready to test out a new technology in the field! We’ve developed tactile sensors that fit on the 2-Finger Gripper, which have the potential to improve grasping abilities for robots.
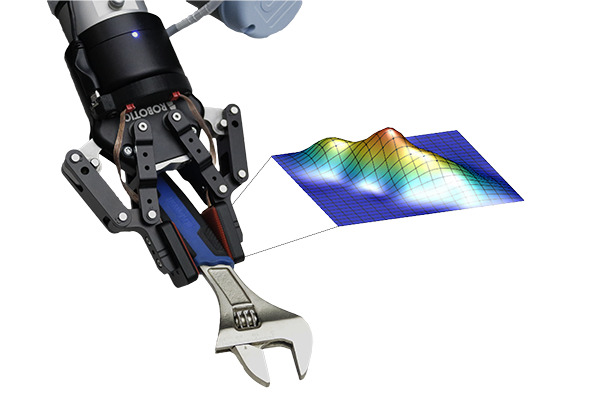
The tactile sensor built by Robotiq is an ultrasensitive multimodal tactile sensor that can measure pressure, contact location, and vibration. Designed to be installed on the 2-Finger Gripper, the tactile sensor pads replace the usual fingertips and connect to a data acquisition module at the base of the 2-Finger Gripper.
Software is then used to interpret data from the tactile sensors, to determine the quality of the good grasp.
More information on the philosophy behind the Robotiq 2-Finger Gripper Tactile Sensor is available here.
Apply here for the beta program. A 2-Finger Gripper is required to qualify for the beta program.
We have a limited set of test units to loan and will confirm the chosen testers by the end of December.







Leave a comment