

Collaborative robot cells are one step closer to entering into small workshop automation systems. The flexible cells have a quick setup time and a huge flexibility. This brings collaborative robots to another level and justifies their use for small batches and high mix part production.


When collaborative robots are introduced to small workshops, the goal is to leverage the use of these robots to the maximum. With the elimination of fencing and security devices, the collaborative (or force limited) robots are a real revolution for the manufacturing world.
However in the past, when it was time to move the robot from a spot to another (from one CNC machine to another, for example), the user has to detach the robot arm, move the robot controller and make sure the new environment was adapted for the robot. Once the robot was moved and installed, a calibration was required.
Nowadays, with the introduction of collaborative cells, all of this is history. In place of all this fussing, the new cells are basically, mobile collaborative robots. Most of the time a force limited robot is fixed on a rolling table. This table contains the power supply, air compressor and the robot controller. The cell can be move around the plant and fixed at a given point to execute given tasks. Once the cell is set, the robot can do an auto-calibration.
Collaborative Cells
A couple of companies have developed this kind of collaborative mobile robot cell.
We know that KUKA has its very own FLEXFELLOW which is basically a LBR iiwa collaborative robot on a mobile platform. All the required devices are built into the mobile platform and it is literally a 'plug and play' solution. We also know that KUKA offers different grippers that can be mounted onto the robot. The Robotiq 2-Finger 85 and the 3-Finger Gripper are candidates for this robot.
There is also the new APAS from BOSCH. This collaborative cell is a one of a kind robot. It is the first certified assistance system on the market. This means that its security requirements are high enough to respect all of the present safety norms. The robot is basically a Fanuc LR Mate 200 with a sense shielding - cover - coat. This means that it has the reliability of a Fanuc robot, but with a cover that can sense any impact. Most collaborative robots sense the force applied on them at their joints, APAS senses the forces at the very moment of the impact wherever the impact is on the robot. This means that the response of the robot (or the robot e-stop) is almost instant.
A pre-built cell with a little less mobility, but the same flexibility level, can also be bought. A good example would be Gibas. They provide all inclusive cells that are easy to set up for ready to go applications such as machine tending.
Collaborative mobile robots are the hot new direction for robots in manufacturing at the moment, so other robot manufacturers are also building their own respective solutions.
Why Use These Devices?
 As I picture it, the main advantage is to move the robot easily around the plant and have a fast setup time. The cell facilitates this movement because it is mounted on wheels, but it is also really cool, because you can place ''fixations'' or permanently attached structures for making the mobile unit very rigid, all-around the plant and reposition the collaborative cell on these fixations as needed, which allows the mobile cell to be easily transferred from one station to another. This increases the cell use.
As I picture it, the main advantage is to move the robot easily around the plant and have a fast setup time. The cell facilitates this movement because it is mounted on wheels, but it is also really cool, because you can place ''fixations'' or permanently attached structures for making the mobile unit very rigid, all-around the plant and reposition the collaborative cell on these fixations as needed, which allows the mobile cell to be easily transferred from one station to another. This increases the cell use.
Which brings me to the next aspect which facilitates the quick set up of this type of mobile robot. Since the table will be secured in a predetermined fixed position, the robot can know its position compared to the different machines it will be working with and will be able to run an ''auto-calibration'' with only a couple of teach points.
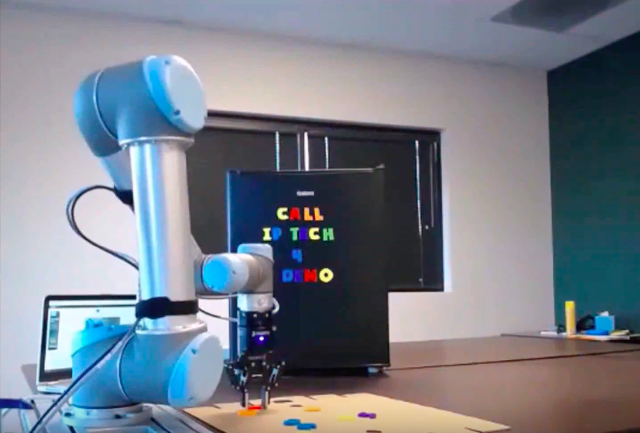
Once this step is done, there is no need to introduce huge pick and place layouts to feed the robot. As you can see in the video above, the rack for parts is approximately the same as a racking that would be used by a human worker. Eliminating the need for fancy automated racking. This means that the working space remains the same if the robot is present or not in the working cell.
All of this results in a low cost robotic cell. By reducing programming time, optimizing processes and reducing calibration time you can save a good deal of production time. The robot can be repositioned to any place around the plant for different applications and is not specific to a single operation. This means a faster payback for the cell, as you can itemize it for many operations. No fencing and no fancy feeding devices also reduce the price of the whole cell. The cell is also very safe for the user and people can work around it without fear of being hurt.
In my opinion it is a very useful and practical solution. It seems like there are very few limitations to what can be done with these kinds of cells. The only thing that might be limiting is the reach or the payload of the robot. Aside from this... there is no limit to what you can do. To get more information on collaborative robots in general or collaborative cells, take a look at the link below.




Leave a comment