
Risk Assessments for Collaborative Robots - Updated eBook
Following the release of the ISO/TS 15066 and the popularity of our eBook on Collaborative Robot Risk Assessment; we thought it


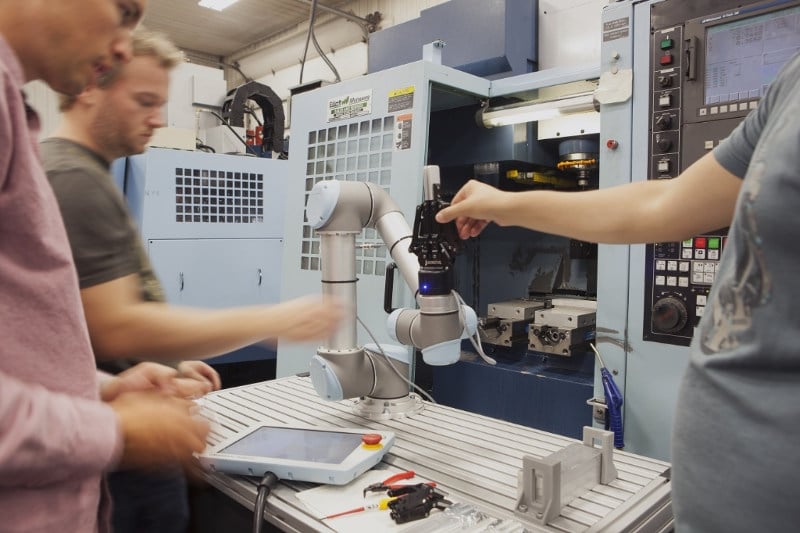
Are Collaborative Robots Safe?
With a constantly growing market, collaborative robots are being used in all types of applications without any fencing. After...

Robotiq Releases a Protective Cover
Safety has always been and will always be a true value in our company. For the last couple of years we have been working with...
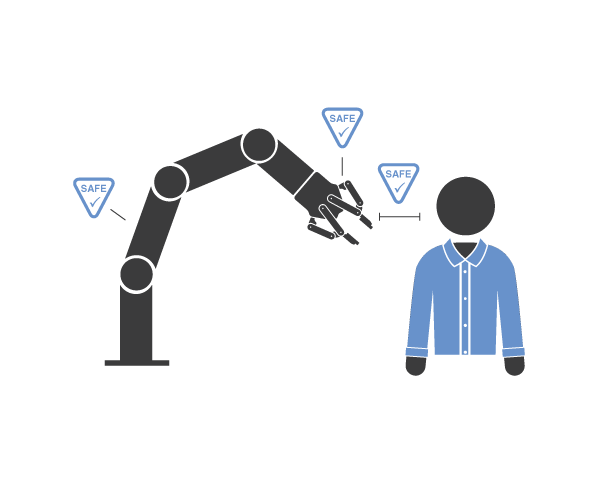
Why the New ISO/ts 15066 is Important for the Robotics Industry
Collaborative robots are relatively new and standards are usually take a long time to write down, so it only make sense to have...
Math's 2015 recap
Wow! 2015 just flew by! I was looking back at what happen over the past year in the robotic world and a lot of stuff happened....
PODCAST Episode Three: Gurvinder singh Virk
Our guest in this edition of Robotiq's podcast series is Gurvinder Singh Virk, a professor of robotics at the University of...


How to Handle Protective and Emergency Stops with Robotiq Grippers
Grippers used in collaborative applications (or any other application really) have to be safe. Since you don't want a gripper...

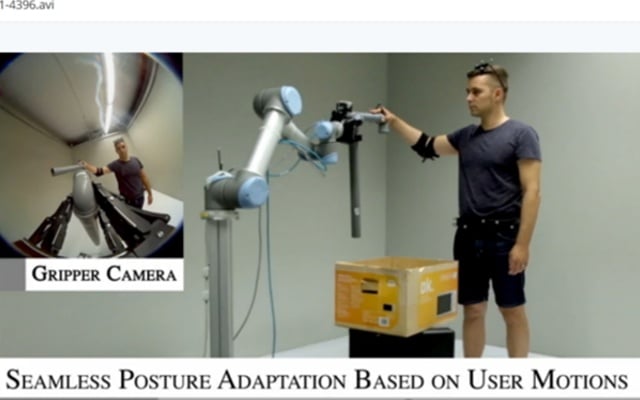
PODCAST: Heni Ben Amor
Assistant professor, Heni Ben Amor, uses the Robotiq 3-Finger Adaptive Gripper for human-robot collaboration. Aim... to develop...

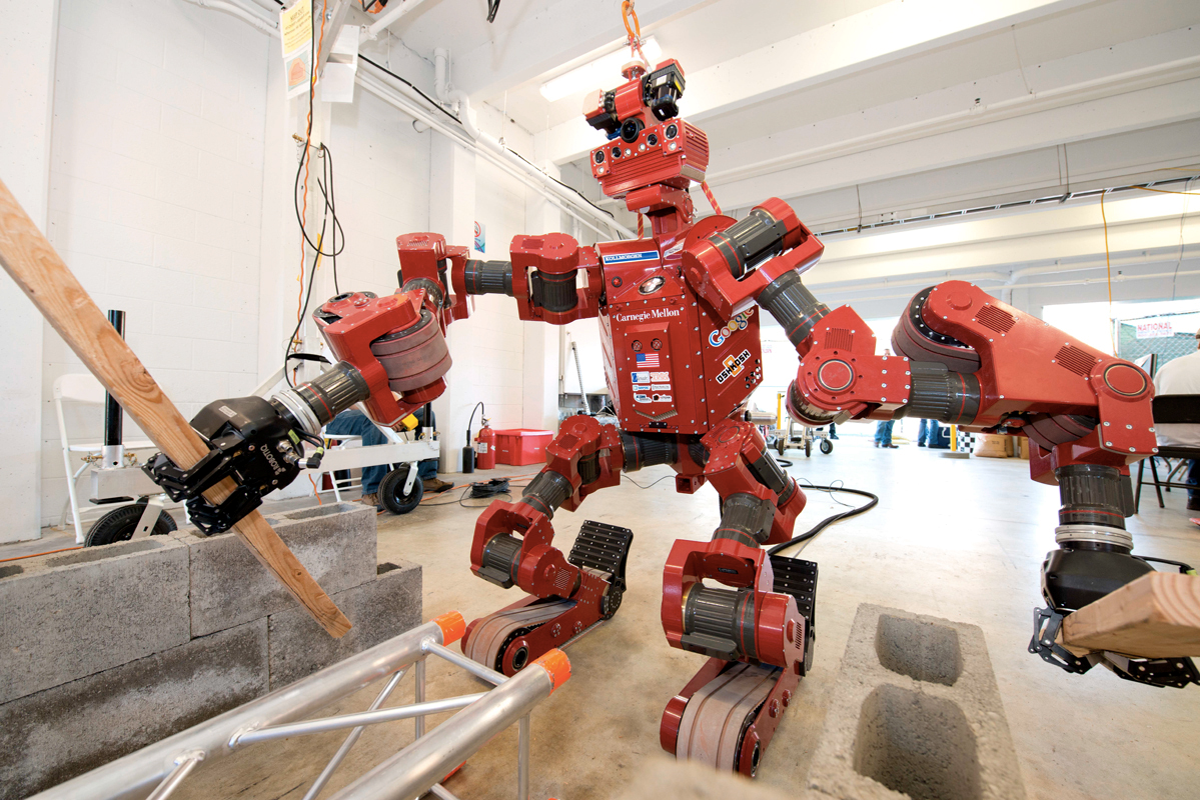
Is My Robotic Co-Worker Dangerous? Why Robots Kill People
Are the public right to be concerned about the safety of industrial robots? Why would a worker climb over a safety fence into...

Leave a comment