
Kinect in Industrial Robotic Application
We've already discussed how the Microsoft Kinect can be used in robotic mobile manipulation. See the following video showing...

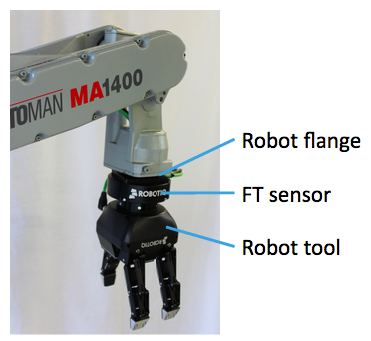
Robot Force Torque Sensor - How does it work?
We recently release an article on ''What is a Force-Torque Sensor''. Now that you know what a FT sensor is, we thought that...

Robot Accuracy and Repeatability in Off-line Programming
This is a short introduction to the importance of robot positioning accuracy, which includes position and orientation...


Robot Force Torque Sensor - An Introduction
Robots are frequently used because of their rigidity. Most applications need rigidity to accomplish the precision necessary in...

Choosing the Right Robot Gripper for your Parts
Choosing a Robot Gripper is always a critical component in the design of a robotic cell. You may want to look at the following...

New Tendon-Driven Robot: BioRob
Bionic Robotics GmbH was initially a spin-off from the Darmstadt University of Technology. Their robot arm called BioRob is...


What Are The Differences Between Ethernet and Ethernet/IP ?
The following article is written to clarify the confusion between Ethernet and Ethernet/IP. First, if you do not know what the...

IP Terminology and Ratings Demystified - Robotics
In the world of robotics, the abbreviation “IP” is often use and can easily be a source of confusion. From Industrial Protocol...

Leave a comment