
Allow Your Universal Robots to Communicate with One Another
What's happening on DoF this week?
- Get the multi robot communication guide
- Share your experience with an Okuma CNC machine
- ...

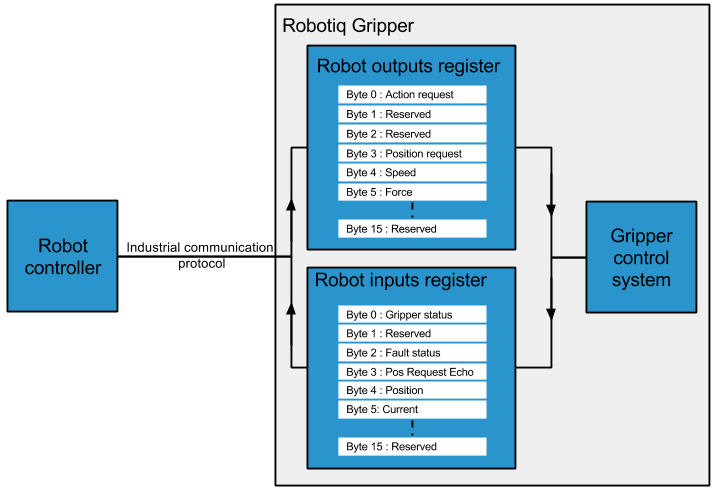
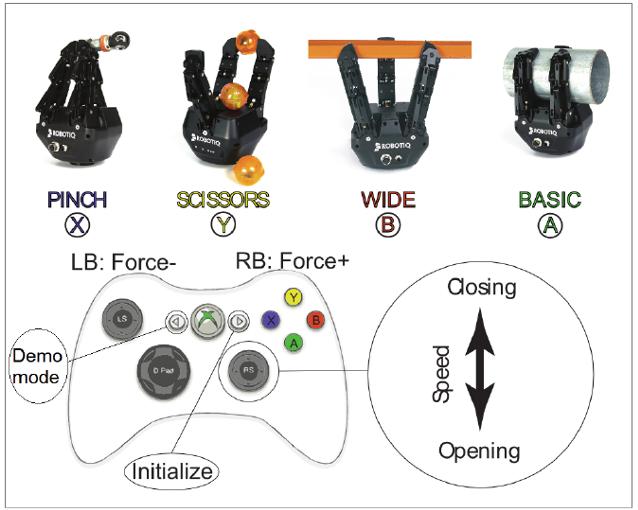
How to Control a Robotiq Gripper
At Robotiq we have been driven by the goal of making robotics integration achievable with the minimum robotics knowledge...

RS485 vs Ethernet: Which One is Most Used in Industry?
While Ethernet is the most commonly used communication protocol among multiple types of devices, ranging from consumer gadgets...

How to Choose the Right Power Source for Your Gripper?
Power source is the backbone of all electrical appliances surrounding us. The main role of a power supply is to adapt the...
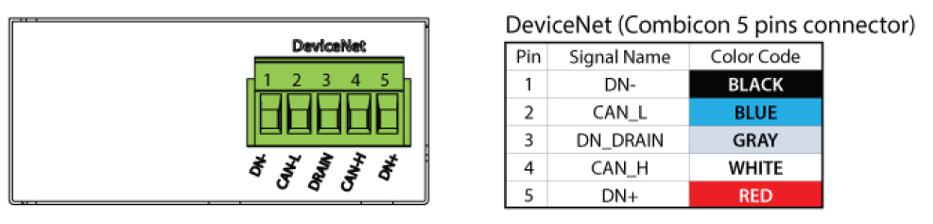
How to Configure a Robotiq Device with DeviceNet Communication Protocol
Robotiq specializes in robotic hardware devices. However, to take advantage of all the toolsavailable to configure your...


Choosing the Right Gripper for Your Robot
Most of the time our blog posts are about functionalities or how a specific kind of gripper works. Although, we have never...
How and why you should use the Robotiq User Interface
Even if Robotiq is basically a hardware provider for the robotic industry, you should know that Robotiq provides a software...
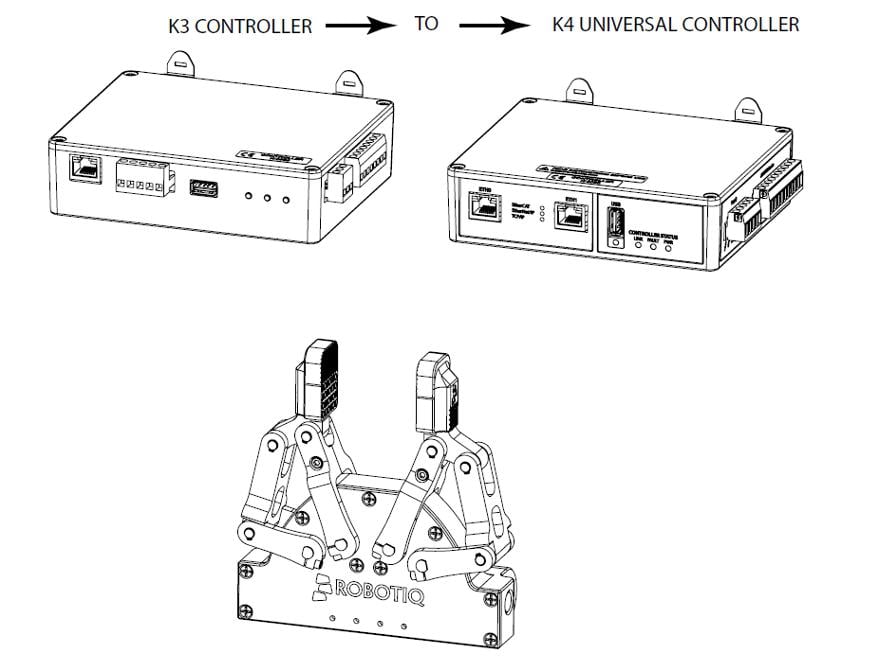
New Controller for 2-Finger Adaptive Gripper-85
At Robotiq we are always seeking to make life easier for our customers. We work hard to include new features on our Grippers...
Using Modbus TCP on an Industrial Robot Controller
Modbus TCP (also called Modbus TCP/IP) is an open industrial communication protocol used to control devices over an ethernet...

Leave a comment