

Q&As When Developing a Robotic Manipulation Cell (Part 1of 2)


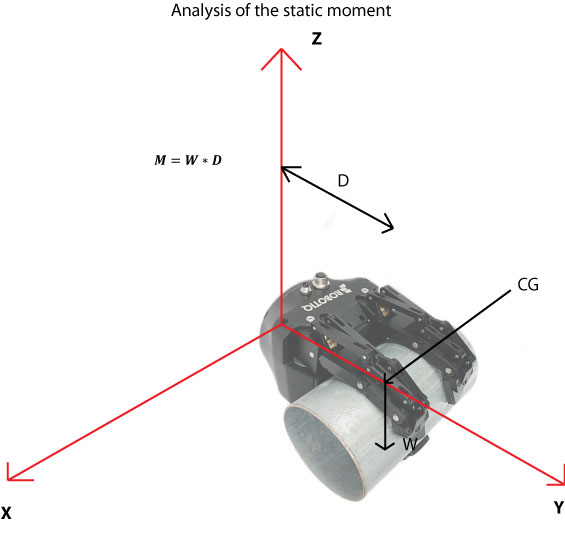
How to Choose The Right Force Torque Sensor?
With the introduction of force torque sensors (FT) in the industrial and research world there are a lot of unanswered...


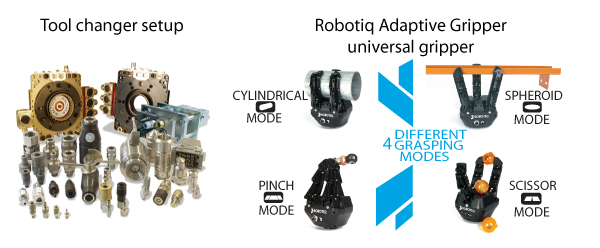
How To Choose The Right Robotic Gripper For Your Application
Grippers consisting of vacuum cups, pliers, or finger assembly are some of the most common EOATs (End Of Arm Tooling) to be...


5 Factors to Consider before Buying a Robot Gripper
When you are designing your robotic cell there are a lot of details that you need to consider. You want to maximally increase...

Integrated Tactile Sensors for Robotic Gripper from ETS
Several members from the École de technologie supérieure (or ETS) in Montreal have been working on tactile sensors which they...


Classification of Robotic Grippers and the Next Generation
In the world of robotics, both the industry and application environment determine the specific tool used at the end of a...
How to Handle a High Number of Different Parts Using one Robot
Handling tens or hundreds of different parts with a robot is not a walk in the park. Issues come mainly from tooling...
How To Attach An End-Effector To Your Robot
Since there are little to no established standards for attachment interfaces in the robot industry, many things are to be...
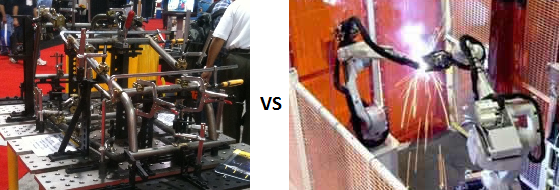
The Evolution and Advantages of Jig-less Robotic Welding
Are you having trouble finding welders? Are you wondering how you could take advantage of robots to simplify your fixtures...
Leave a comment