

Handling tens or hundreds of different parts with a robot is not a walk in the park. Issues come mainly from tooling complexity and feeding parts to a cell. These types of applications can occur in two general cases.
- The first application scenario is where you have all the parts coming to a station and need to weld, glue, sort, kit them, etc. These types of applications are usually done manually in industrial settings at this time.
- The second application scenario is when a part comes to the cell but the part model to be processed changes all the time. In this case, it’s a matter of reducing the setup time between different parts.
This article presents three main aspects that need to be considered when you are facing the challenge of handling a wide variety of different parts with one robot.
1. Analyze part geometry
- Sizes
- Shapes and operations
The size of a part will determine the required finger stroke while its shape will determine the gripping mode to be used. The weight of a part and material will be taken into consideration when choosing actuation type and force. For other application requirements, see our article on choosing the right gripper.
2. Gripper choice
- Option 1: Several custom grippers and a tool changer
- Option 2: Universal gripper such as the Robotiq Adaptive Gripper
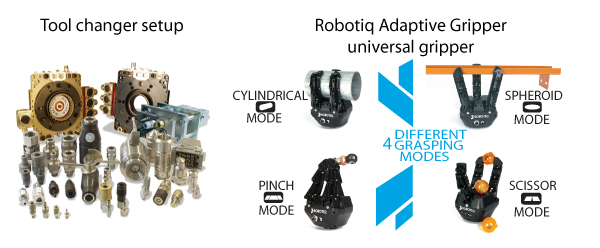
Now that you know what your gripper must be able to do, you have to choose between a custom or universal gripper.
Having multiple custom grippers, one for each kind of grasping and stroke needed, will require the use of a tool changer. You can learn more about that option in this article about the challenges of using a tool changer.
The universal gripper option requires less setup time and no cycle production time, it also takes less space. A good universal gripper will have servo-electrical actuation so you can have control over actuation force and finger position for a range of parts. Be sure the universal gripper you choose can fit all the parts you want to handle.
3. Identifying and locating the parts
- Option 1: using fixtures, racks of parts where the robot goes without asking questions
- Option 2: using a vision system
Since robots have been used in industrial settings, fixtures, jigs and racks hold the parts, or tools, and the robot goes blindly to the rack where the part is supposed to be and takes it. However, recent developments in machine vision and the increasing availability of hardware are providing more accurate, affordable solutions. Machine vision can provide a great boost to the flexibility of your robot cell when combined with a programmable servo gripper.
A camera must be chosen for precision, size and weight since it is often mounted on top of the robot. The light source must be chosen to fit the working environment and parts to be viewed and manipulated. The ambient light must minimize influence on the system with factors such as: sunlight, sparks and/or reflections.
It is crucial that your vision software is easy to use. There won’t be any gains in productivity if it takes days to setup vision for new parts. The software must be robust to the variation in part orientation, light variation and other perturbations. The vision solution will also need to be able to detect various shapes and sizes of parts.
Making the right choice
In choosing in the different options above, make sure that you consider all costs involved. You will also need to review the flexibility of the option and whether it will be able to face unpredicted changes in production. Can it adapt to new parts or new processes?
DOWNLOAD our ROI Calculator to use as a template to compare different options.




Leave a comment