

Medical applications using automation and robotixation are becoming more and more popular. For example, some patients need to be treated for spinal cord disease with robotic suits that can help them walk again. Doctors tend to use motorised robots that can move in the hospital and can monitor how their patients are feeling. You probably have already seen a lot of medical applications around you. With our 2-Finger Robot Gripper - 85, we have been lucky enough to be part of a medical experiment—a physiotherapeutic robot project called C-Bot, from FisioBot. Here’s an example of what is going on with the medical aspect of our adaptive robotic gripper.
The physiotherapy clinic, called Clinica Ordonez, in Spain is actually using a special robotic treatment for patients that suffer from upper body illnesses. First, the patients receive their own, individual RFID (Radio-Frequency ID) chip. This chip will follow them throughout all their procedures. The patient is then laid down on a treatment table. Their body is scanned to recreate a 3D model. Once the tridimensional model is created, the physiotherapist meets with the client to talk about the specific treatment that can be provided to them. Depending on the illness, the specialist can choose between thermotherapy, vacuum therapy, hot air therapy, electrotherapy and laser therapy.
All of the above processes are executed by two robotic arms paired to a 2-Finger Adaptive Robot Gripper. The robot is basically a collaborative robot from Universal Robots. This robot arm is recognized to be quiet and simple to use. Since this robot has been designed to be “collaborative’’, it is not necessary to use external devices, like cages, for human protection. This is why it can treat patients without being dangerous for them. The robotic arms can apply enough force to treat the patient correctly, but it can not go over 150 Newtons (which is acceptable according to the “force and torque limitation” set by the ISO Standard.)
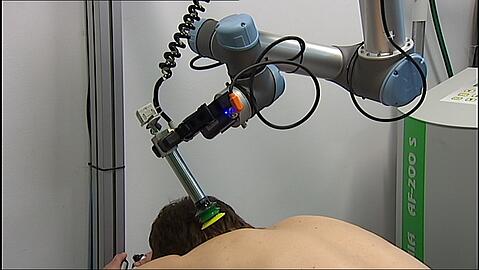
Furthermore, some of the treatments that need to be done on the patient are dependant on the distance between the tool and the patient’s body, therefore, the use of a robot is critical. In fact, the treatment tools probably shouldn't be manipulated by a human considering the errors in positioning that are possible without precise feedback. With the 3D model, the robot can place the tool at the exact distance away from the body, all over the body, which in turn makes the treatment a lot more efficient.
Since the patient can be treated with several different techniques, different tools have to be used. This is why the physiotherapy clinic has chosen to use an Adaptive Gripper. Choosing a 2-Finger Adaptive Robot Gripper-85 allows the medical robot operator to handle a large variety of tools, for example inspection tools with a certain shape and treatment tools with a different shape. The flexibility of the Gripper is a key advantage for the clinic. This feature allows them to keep the same end-effector for the whole treatment process. The only thing that has to be changed is the medical tooling. With a range of 85 mm, the 2-Finger Robot Gripper is wide enough to grasp all of the regular medical tools on the market, since most tools are designed to fit in a human hand and 85 mm is roughly the palm width of an averaged sized human hand.
Here’s a little video (in Spanish) that gives you an idea of what is done with this medical robot.
Hopefully this is just the beginning of our collaboration with this company and that more C-Bot robots will be used around the world. This article presented just one example of an interesting service application that can be done with our Adaptive Gripper. Take a look at which end effector can be the most reliable for your application.







Leave a comment