


The future of collaborative robots is in their ‘hands’. Perhaps a poor play on words, but also an unavoidable fact. Grippers/robotic hands are almost invariably what cobots use to interact with their surroundings and perform tasks.
Looking at the speed of technological advances, cobots are heading for a bright future – something exemplified by Robotiq’s Gripper technology. From Laval University, through R&D development to today’s extensive use by companies across many industries, Robotiq’s Grippers have evolved greatly. They serve as a good illustration for the general advances that the industry has undergone.
To find out more about Robotiq’s Grippers and what they can do for your company, download the free ‘Grippers for Collaborative Robots’ ebook here.
.jpg?width=465&name=2%20Finger%20Gripper%20UR%20Best%20of%20Rsz1000%20(41).jpg)
Two Gripper Paths Merge
Before we get to the actual advances, it might be good with a quick look at the history of robot hands/Grippers.
Back in the days of the Y2K bug (yes, I’m old enough to remember that), robot hands were, to some extent, the remit of university researchers and organizations like NASA. Many projects aimed to mimic the versatility and dexterity of a human hand. Unfortunately, that often made the hands difficult to control due to the many actuators needed to drive it. The hands were also expensive to build and energy hungry.
Industrial robotic companies generally took another path, and focused on designing industry-specific Grippers that were relatively simple and task specific. The resulting Grippers were highly effective, but limited in versatility and flexibility.
These two diverging paths have gradually been merging/melding. In large part thanks to technological advances and the incredible work of robot designers and researchers around the world. Their combined efforts have led to robot Grippers, like the ones offered by Robotiq, that meld the versatility and flexibility of robot hands and the precision and energy efficiency of robot Grippers.
Here are four big trends that illustrate how robot Grippers, and the technology behind them, are evolving.
Closer to the Human Co-Worker
Collaborative robots are (duh, you could add) meant to collaborate with us. The same goes for robot Grippers, which are becoming much better suited for direct human-robot collaboration.
Another hugely important aspect of this collaboration is the simplification of integration, programming and use of collaborative robots. In other words democratizing the use of robots. Two tech trends help makes this possible. One is the standardization of mechanical and electrical connections, which make it easier for a company to integrate the robot in a production setup. The second is simpler interfaces, which allow non-experts to program collaborative robots.
“If you want to boil it down, this democratization of robotics is the core to what Robotiq does. Something bolstered by robots moving out of protective cages and working alongside of human. What is available on the market today is just the beginning. The new TS/ISO-15066 for collaborative robots and the upcoming TS for safe Grippers will lead to even higher levels of direct collaboration. Developments in End of Arm Tooling (EoAT) will also help boost collaboration,” Jean-Philippe Jobin, CTO at Robotiq, says.
Computer Power to Rove Around
Exponential technologies (which robotics is among) rely on the explosive growth in computing power. As Intel CEO Brian Krzanich pointed out recently, a 1971 VW Beetle upgraded at the same speed as a computer chip from the same year would today have a top speed of 300.000 miles an hour. It would also cost you the staggering amount of four cents.
This growth in computing power for your buck is fundamental for collaborative in diverse areas, including how it navigates and interacts with its surroundings.
“Robots today are well able to accomplish tasks in structured environments. If it knows where everything is, there aren’t any problems. Semi-structured and unstructured environments are magnitudes more difficult for the robot to navigate and work in. Masses of raw computing power and artificial intelligence (AI) are useful tools, if not essential, for the robot in these types of environments. Of course, that applies to the robot’s Grippers as well,” Jean-Philippe Jobin says.
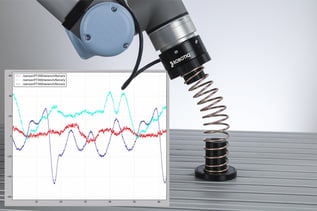
Better Sense of Data
 AI and computing power can help the robot make sense of unstructured environments, but that process relies on analyzing masses of data. Supplying that data are sensors measuring tactile, force, orientation, pressure, temperature, acceleration, proximity, vision, etc. – that are becoming both cheaper and more sophisticated all the time. It increases robots’ flexibility in regards to navigating new environments and performing new tasks.
AI and computing power can help the robot make sense of unstructured environments, but that process relies on analyzing masses of data. Supplying that data are sensors measuring tactile, force, orientation, pressure, temperature, acceleration, proximity, vision, etc. – that are becoming both cheaper and more sophisticated all the time. It increases robots’ flexibility in regards to navigating new environments and performing new tasks.
“New sensor data also improves collaborative robots’ abilities in relation to known tasks. For example, data on confirmation of a grip can help tell a robot if a part it is holding is slipping. Companies like Robotiq are working on integrating these – and many other - sensor technologies. This will make it possible to automate many processes in manufacturing and assembly that today stretch most cobots’ capabilities beyond the limit,” Jean-Philippe Jobin says.
Power to the Small
Another major development is minor (word play level: dad joke). On a more serious note, new designs are making actuators smaller and more efficient.
“The actuators, which move the robots’ Gripper mechanisms, are also increasingly better suited for robots and Grippers. For example in regards to delivering high efficiency at low (or no) speed. We can now design and build stronger/smaller Grippers, which in turn make collaborative robots perform even more tasks,” Jean-Philippe Jobin explains.
“At the turn of the millennia, the Holy Grail was replicating the human hand, but I think that we have moved on since then. The goal now is creating robot Grippers/hands that not just have the "Swiss Army Knife" flexibility of humanoid hands, but capabilities even beyond that. I think the advances in robot and Gripper technology are quickly bringing this goal into reach,” he adds.





Leave a comment