

How to do Product Testing using a Robotiq Gripper
When you are manufacturing a product, you have two main concerns; deliver a quality product and have the lowest production cost...


Dual Arm Warehouse Picking Using Robotiq Gripper
At the last (and first) Amazon Picking Challenge, we saw different prototypes of robots trying to grab objects from shelves to...

How to Convert your 2-F85 to a 2-F140
We have recently release the 2-Finger 140 Adaptive Gripper. This Gripper was designed to achieve tasks that require a wider...

Robotiq Releases the 2-Finger 140 Adaptive Robot Gripper
Using adaptive Grippers make life easier for robot users that require a great flexibility for a high mix of parts. With...

The 2-Finger 140 Adaptive Robot Gripper Now Commercially Available!
Always driven by the idea of giving manufacturers maximum flexibility in the automation of high-mix processes with a single...


How Many Fingers Do You Really Need for a Robot?
Why do we humans have 5 fingers on each hand? It’s a question which you probably rarely think about. But, as roboticists, it’s...

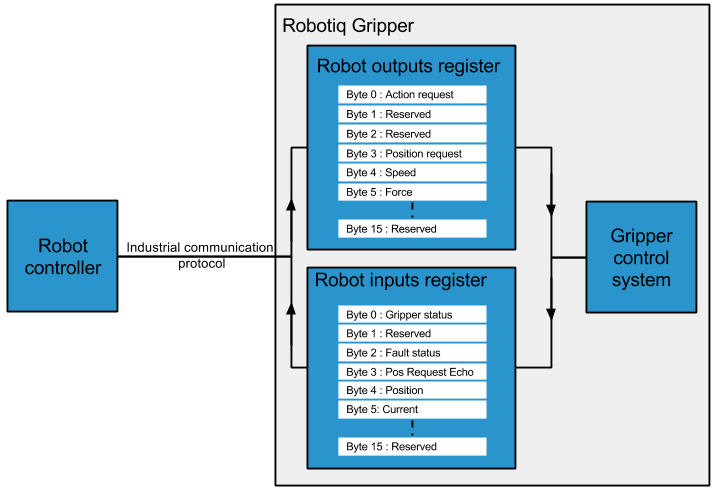
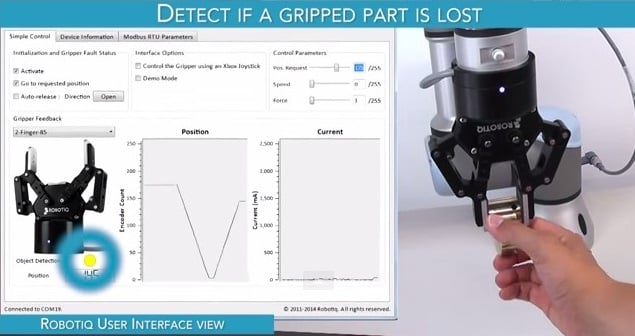
How to Control a Robotiq Gripper
At Robotiq we have been driven by the goal of making robotics integration achievable with the minimum robotics knowledge...

Robotiq Adaptive Robot Gripper - New and Enhanced Features
At Robotiq we are always seeking integrated solutions for our end users. As our Grippers can adapt to different geometries, we...
3-Finger Adaptive Robot Gripper History
Robotiq is a spin-off from the Laval University Robotics Lab. At the time, the 3 co-founders were not quite sure that...
Leave a comment