

Why Use a Robot Gripper with 3 Fingers?
Seeing all these robot grippers out there you may wonder, what are the advantages relative to the number of fingers presented...

Part Ordering Using Weight Measurement AKA Force Feedback
In the last couple of years, robots have been given a lot more senses than they used to have. Beginning with vision using...

German Space Agency, DLR, Using 3-Finger Adaptive Gripper
Robotiq Grippers in space? Not quite yet. However, some of our international sales reps have spent time at the German Space...
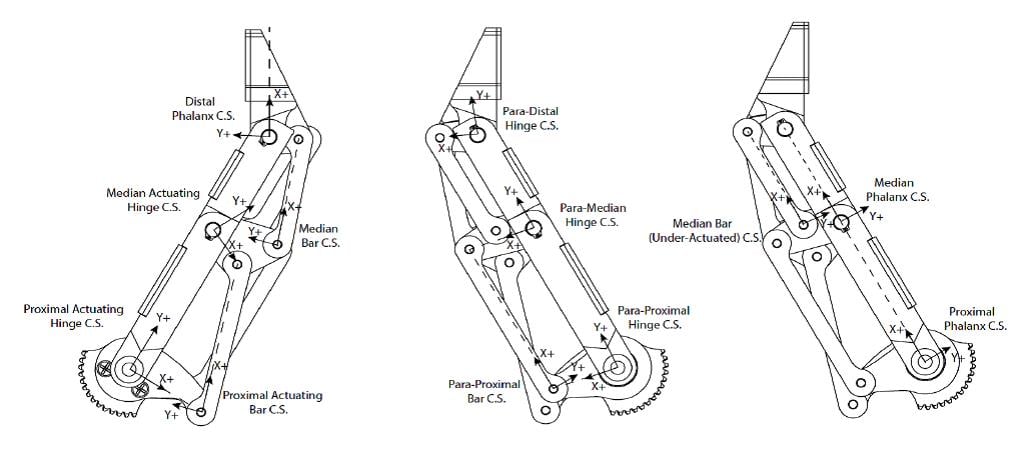
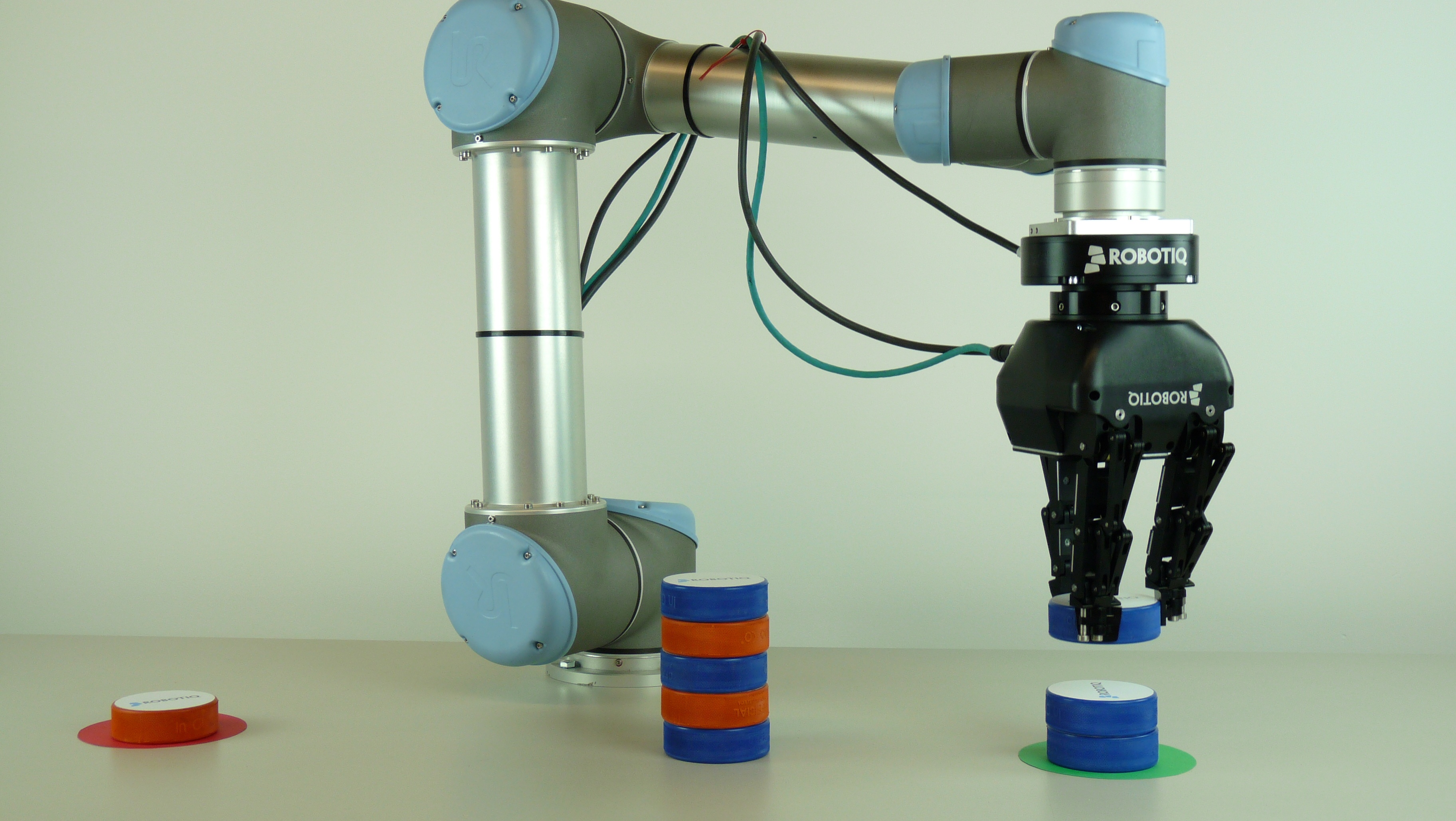
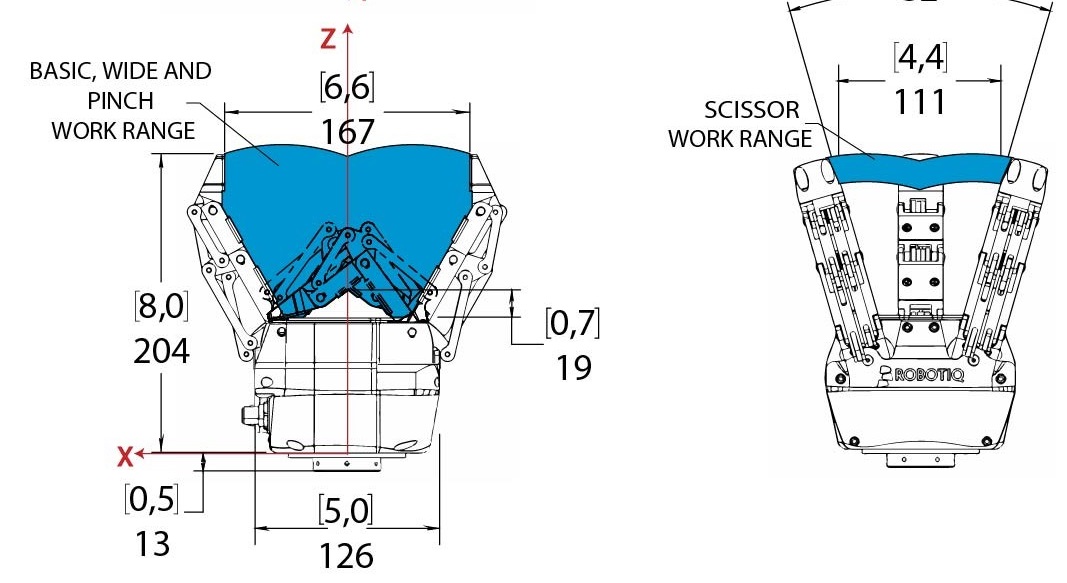
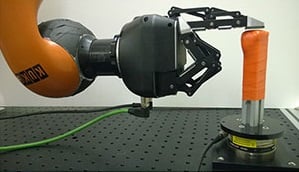
3-Finger Adaptive Gripper Simulation Data
At ICRA 2015 we got a lot of feedback requesting supplementary data concerning our 3-Finger Adaptive Gripper. The robotic end...

Robotiq Q&A with ROS Contributor
Over the years, we have seen a bunch of applications in many research fields, with the introduction of ROS Industrial in the...
3-Finger Adaptive Gripper Raring to Go at the DARPA Robotics Challenge
The DARPA Robotics Challenge Finals are on their way and we are really excited. It is always fun to see research labs such as...

How to Choose the Right Power Source for Your Gripper?
Power source is the backbone of all electrical appliances surrounding us. The main role of a power supply is to adapt the...

Robot Gripper Metrics Studied at NIST
If you are already using a robot gripper you may have been through the selection process for the gripper. This can be a very...

How to Choose a Parallel Gripper for My Robot?
Ok, here you are, you decided to automate your process. You have chosen which application will be done by the robot and now you...
Leave a comment