
Top 5 Advantages of Servo-Electric Grippers
In an elecric gripper, or servo-gripper, electric motors control the movement of the jaws using electric input from the robot...

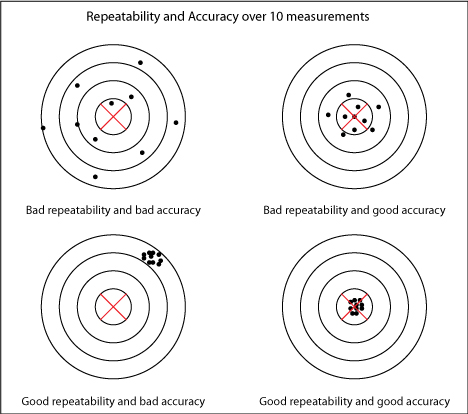
Robotic Gripper Repeatability Definition and Measurement
On any robotic gripper spec sheet, you will find a measure of the repeatability. What does that term really mean? This blog...

How To Choose The Right Robotic Gripper For Your Application
Grippers consisting of vacuum cups, pliers, or finger assembly are some of the most common EOATs (End Of Arm Tooling) to be...
How to Create Fast Cycle Times with the Adaptive Robot Gripper?
One of the advantages of a servo-electric robot gripper is that it allows you to control the position of the fingers. If the...

How Do Fingers on the 2-Finger 85 Adaptive Gripper Work?
When watching how the 2-Finger Adaptive Robot Gripper works in the following video you might ask yourself; how this Gripper...

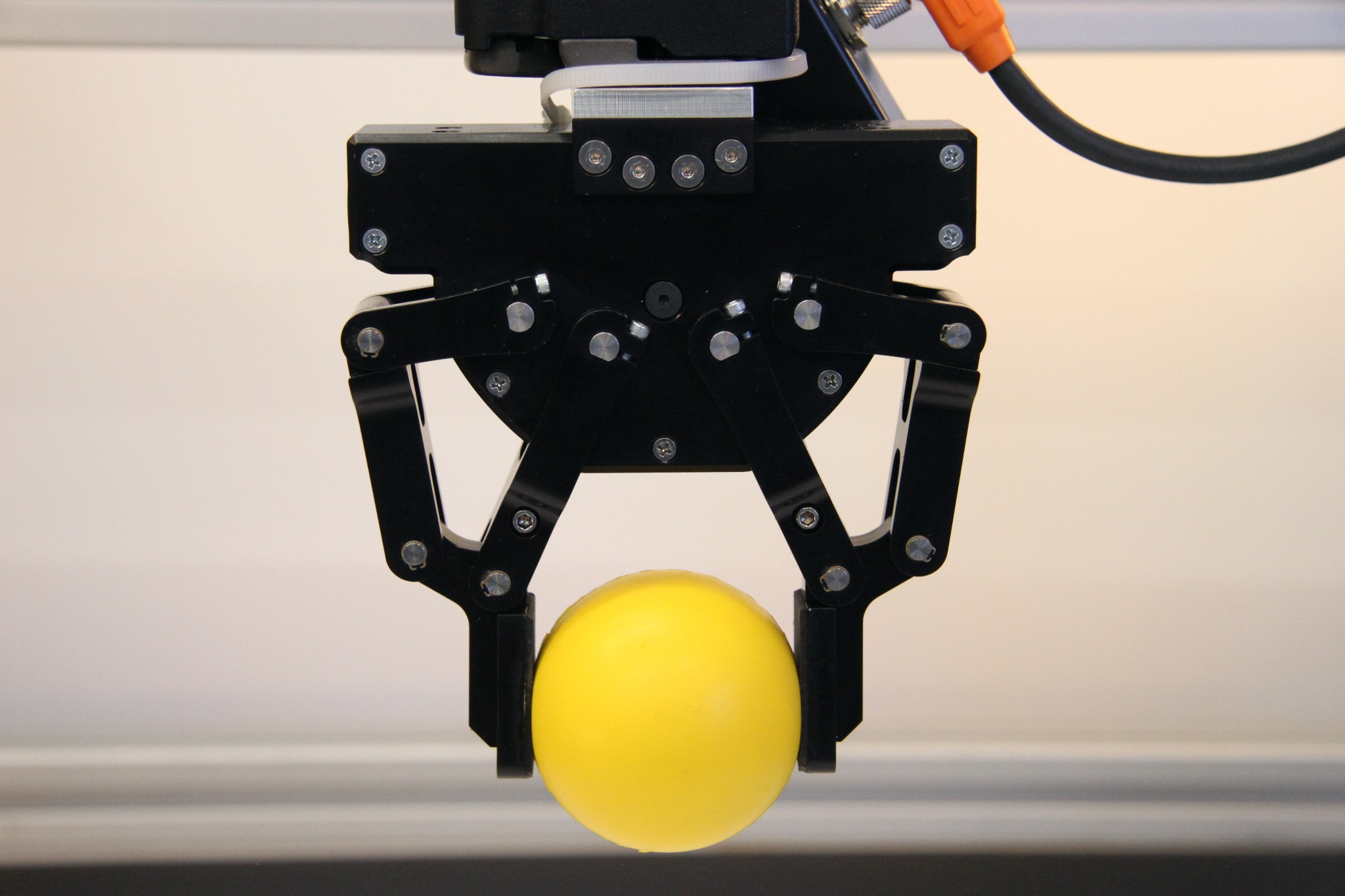
How to Handle Fragile Parts with Robotiq Grippers
As you may be aware, robots are well known for their high gripping force and power. But as robotic applications are expanding,...


5 Factors to Consider before Buying a Robot Gripper
When you are designing your robotic cell there are a lot of details that you need to consider. You want to maximally increase...
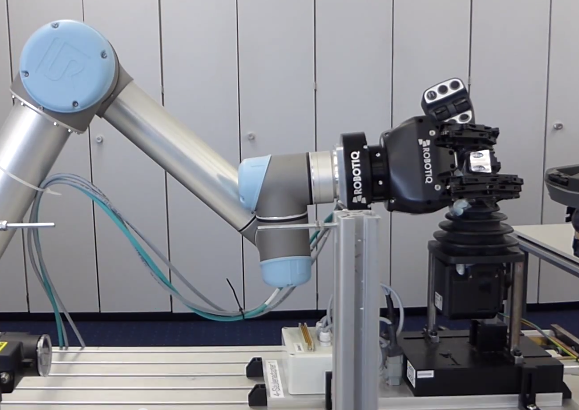
Servo-Electric Gripper: How Does It Work
This article presents an overview on how a servo-electric gripper works. The image below shows the main components of an ...

Robotiq 2-Finger Adaptive Gripper Now Packaged for Baxter Research
Following the latest Software update by Rethink Robotics for Baxter, our engineering team here at Robotiq has developed a...

Leave a comment