

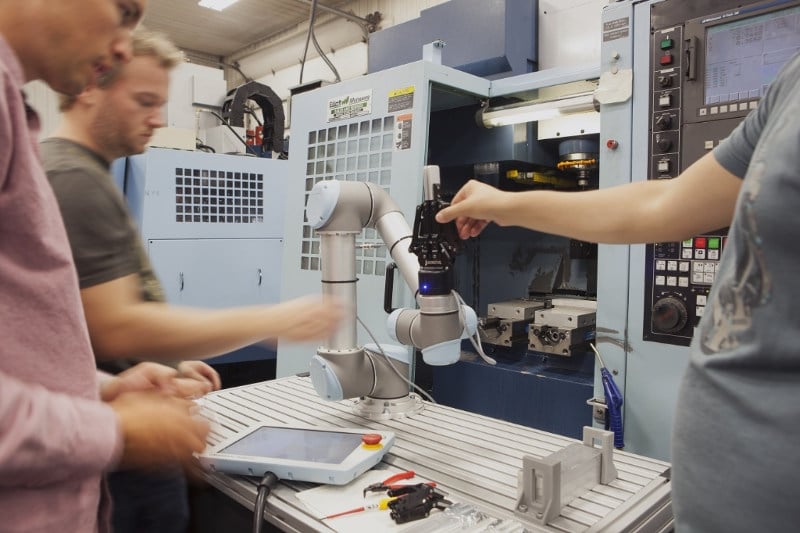
What Are the Best Collaborative Robots?
Which robot is the best? Hhmmm? It's pretty much like asking which car model is the best... There is no real answer except: The...


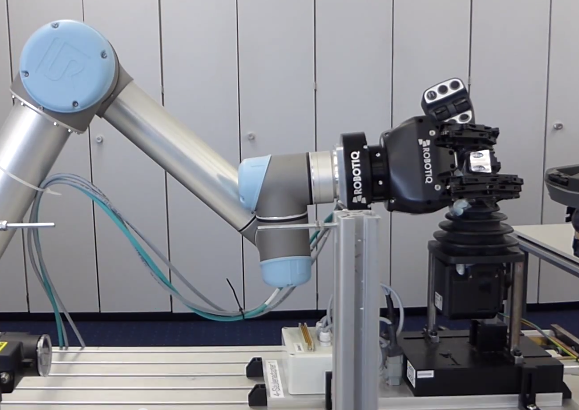
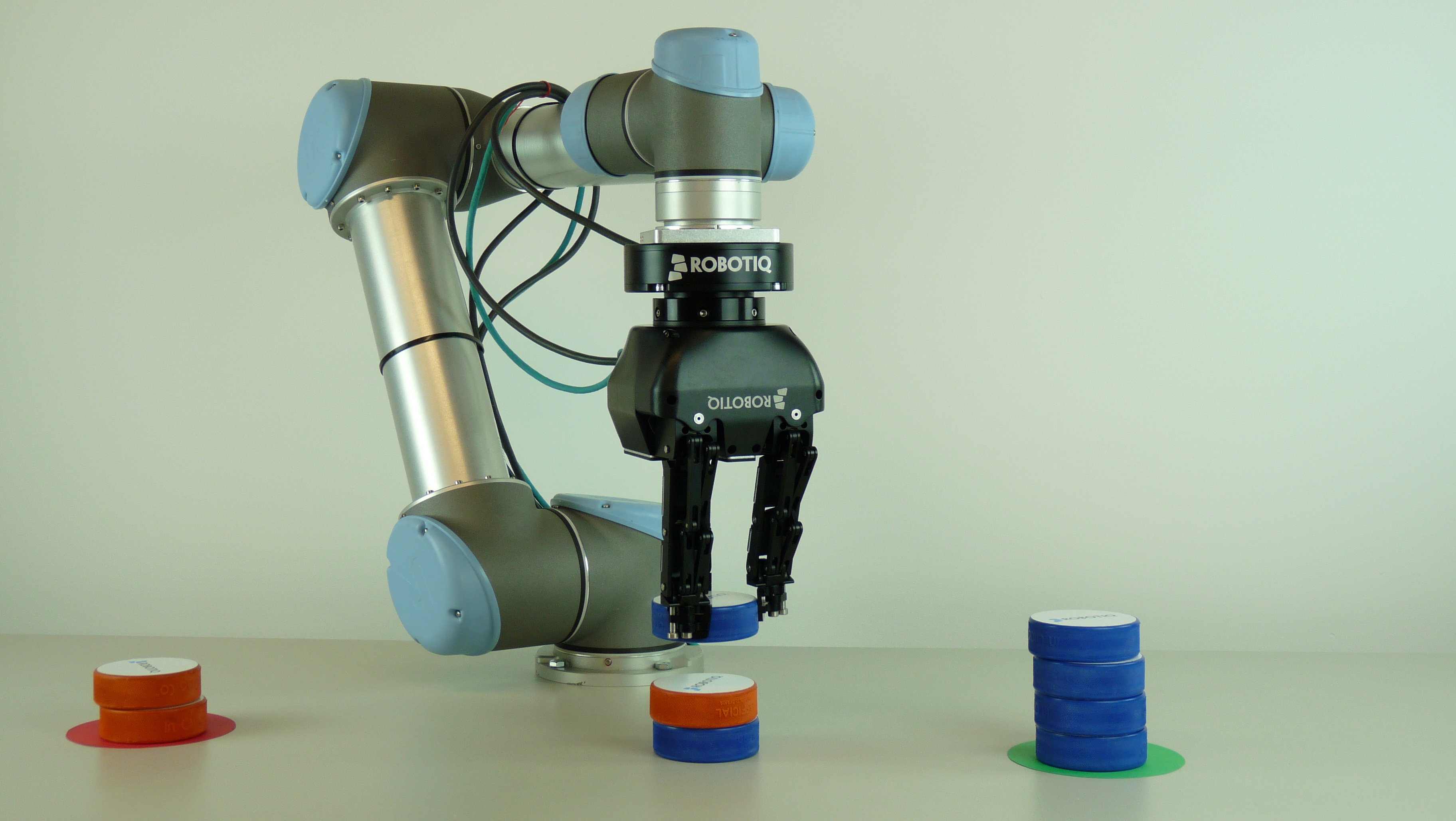
The Next Generation of Robot Manipulators
What is THE end effector of the future? Is there a specific end effector that will be able to grasp everything? From car doors...

Robotiq Releases its New Force Torque Sensor, the FT 300
Robotiq launches its newest Force Torque Sensor: the FT 300, bringing a sense of touch to your robot. With plug and play...
Why You Should Set Your Robot Payload ?
Payload, grip force, weight, reach are all data that are used to describe and differentiate robots from each other. Payload is...
5 Reasons Why You Should Use Force Feedback in Robotics
For many years, industrial robots were not able to monitor their surroundings. With the introduction of different sensors for...
Programming a Robot is as Easy as 1-2-3 !
''Robots are complicated'', ''You need to have an experienced technician to operate them'', ''We are not using robots, it is...

How Many Axes Should My Robot Have?
If you have already shopped for a robot you have probably already been confronted with the number of axes that are included in...
Create a Pallet Program Using Universal Robots
There is an almost infinite possibility for applications that can be done by a robot. However, there are a few general situation
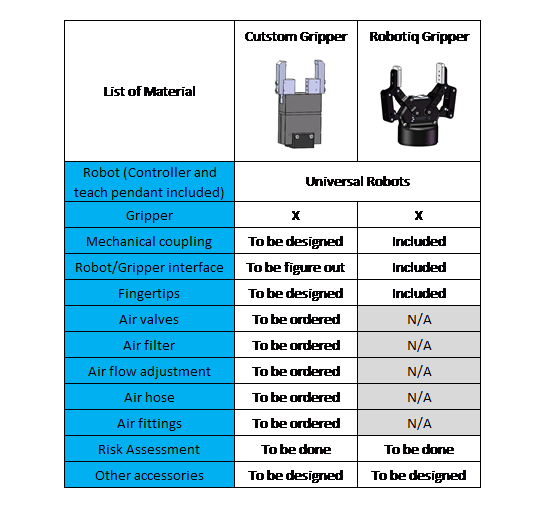
Which Robot Gripper is Easier to Integrate ? Part 2 - Design Process
In this blog series we are looking at the different steps involved in collaborative robot integration. The first article in the...
Leave a comment