

Top 5 Applications for Robotic Electric Grippers
Electric servo grippers offer a different set of functionality than pneumatic grippers. They trade speed and force for...


What are the Sources of Robot Inaccuracy?
Many industrial applications require accurate robots to achieve critical tasks, such as aeronautic manufacturing [1] and...

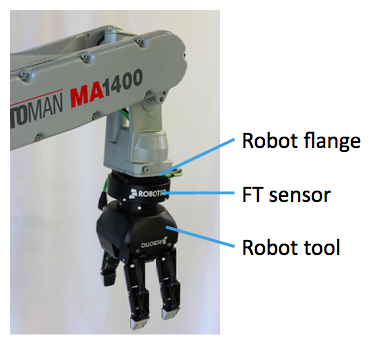
ROS with the Robotiq Force Torque Sensor
Force torque sensors are used in research for many advanced robotic manipulations. At the same time, ROS is widely adopted by...

Choosing the Right Electric Gripper
There are a lot of different robot grippers on the market. However, there are two very distinct types of industrial gripper...

How to Program Robotic Welders with Kinetiq Teaching
If you are following our blog you must have heard of Kinetiq Teaching. Even if we say that programming a welding robot is...
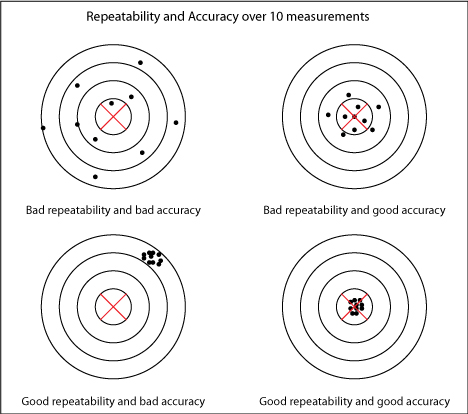
What are Accuracy and Repeatability in Industrial Robots?
An industrial robot has many metrology or measurable characteristics, which will have a direct impact on the effectiveness of...

Choosing the Right Robot Gripper for Your Environment
In the last blog post we discussed the best way to choose a gripper depending on he kind of parts you need to deal with. We...

New Collaborative Robot: APAS assistant from BOSCH
Bosch launches their first collaborative robot solution: APAS. This one of a kind robot has some really impressive...

7 Types of Industrial Robot Sensors
In the industrial and automation world, machines need sensors to provide them with the required information to execute a...

Leave a comment