

Contactless Robot Teleoperation at Arts et Métiers ParisTech
Robotic collaborative applications are mostly related to robots working autonomously alongside humans. The robot is helping...

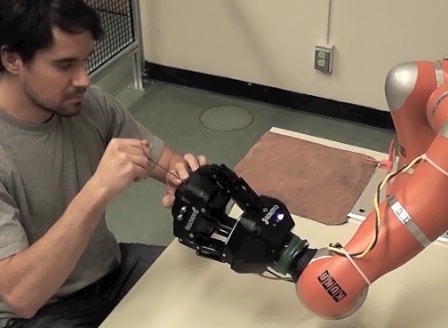
Robot Giving a Hand to Make... a Robot Hand!
Bringing humans and robots together in the same working environment is a big research and development theme across the global...


Tribute to Mike Stilman
A couple of weeks a go we were in Atlanta for Fabtech. During our stay, we had the opportunity to visit the Georgia Tech...
.jpg)
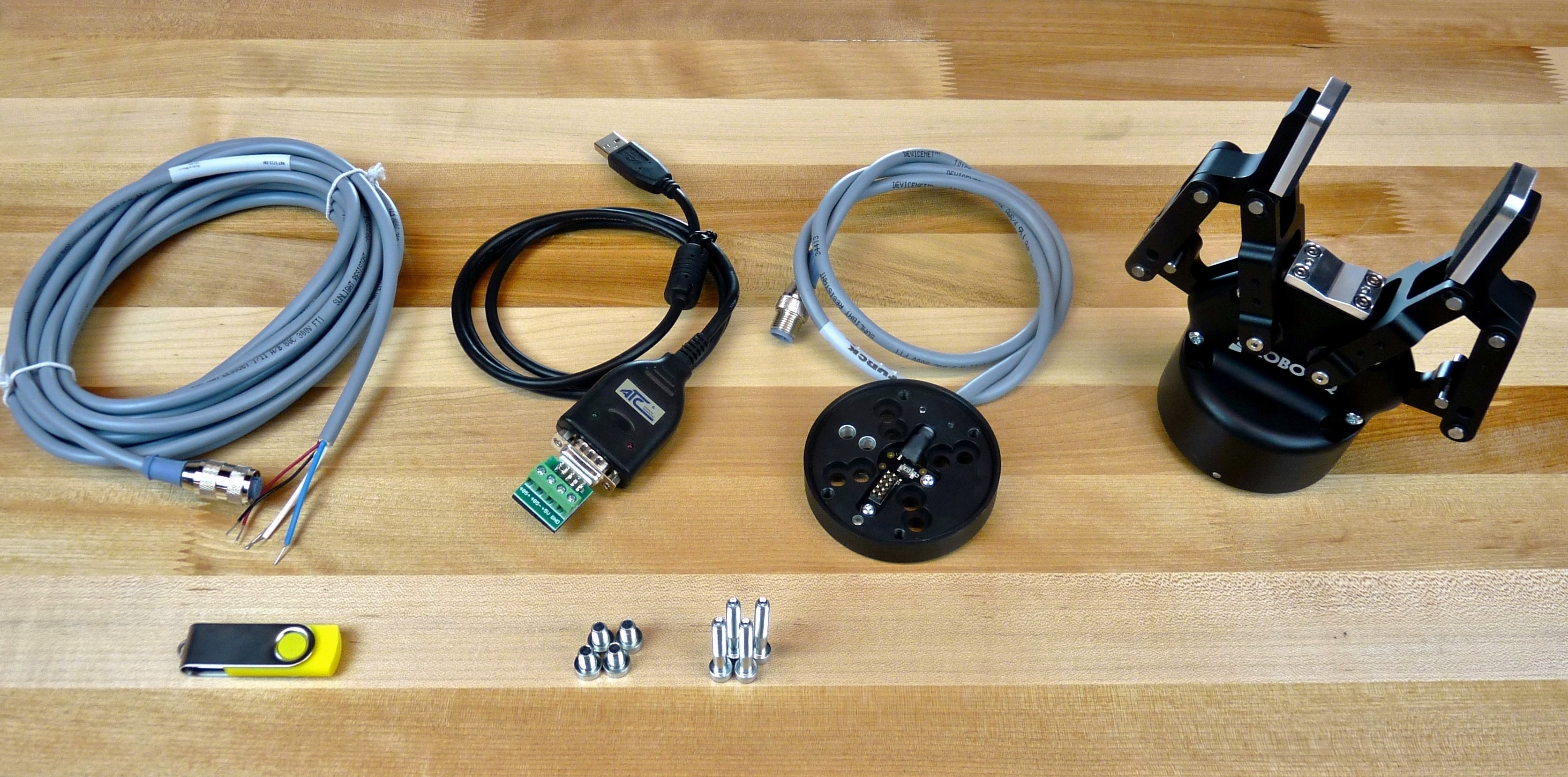
How to Install the 2-Finger 85 Adaptive Gripper on Universal Robots
Our goal at Robotiq is to facilitate the integration of robotic grippers in automation processes. As integration includes...

Machining with Industrial Robots
The machining world has been using robots for a little while. Mostly to do machine tending. Although, with a lot of...
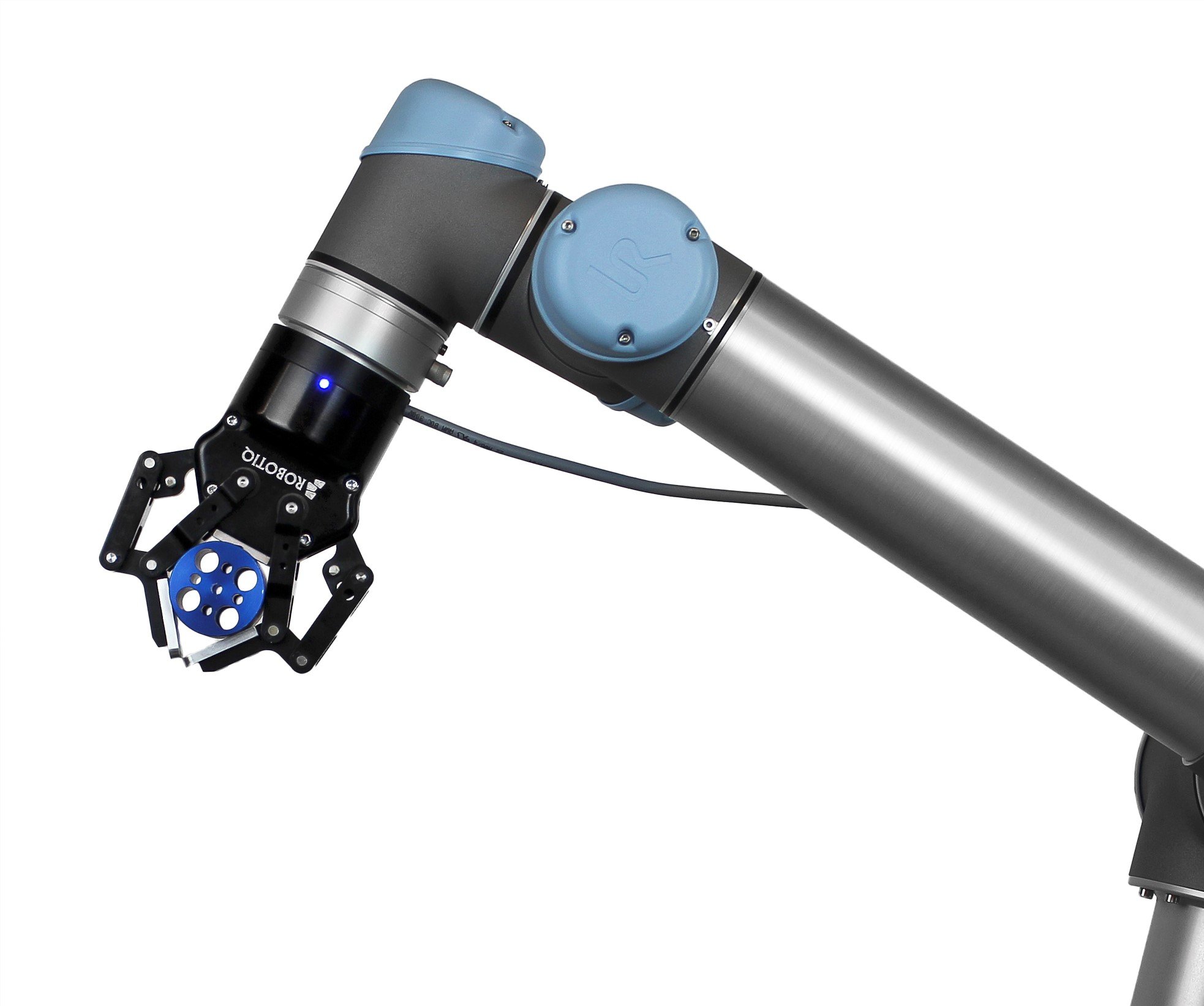
The Best Electric Gripper for Universal Robots
We have recently launch a new version of our 2-Finger 85 Adaptive Gripper. It has been designed with collaborative robots in...
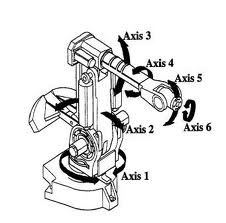
How Can an Industrial Robot Be Calibrated?
Robot manufacturers claim to have a given accuracy and repeatability. Although, all of these specifications can only work when...


New Electric Gripper Plus Kit for Universal Robots
Robotiq releases a new version of the 2-Finger 85 Adaptive Gripper. Twice as strong and 50% faster than its already successful...

What are the Important Robot Force Torque Sensor Specifications?
I remember buying my first computer, there was a lot of technical data to compare, so I ended up asking the salesperson 'What...
Leave a comment