

How to Integrate Your First Robot (Part 2/3 Lack of Skill)
To continue our blog post series on how to integrate your first robotic cell in your workshop, we first recommend that you read...

How to Integrate Your First Robot (Part 1/3 Lack of Time)
The Danish Technological Institute (DTI) has recently led a study to evaluate what was the gap between manufacturers and their...
Why Robots Will Be The Biggest Job Creators In World History
I read a quote from an article that illustrated the right way to look at process enhancement. ''Two cavemen are struggling with...
Clearpath Mobile Manipulator to Automate your Warehouse
As I was writing in a previous blog post, ''2015 Year of the Mobile Manipulator?'', we can see that several companies are...
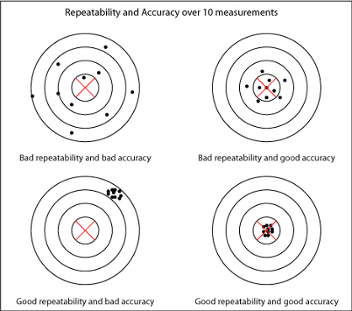
Experiments Show Universal Robots' Repeatability
There are a relatively large number of robotic applications that require approximate or rough accuracy. Packaging or...

Why Use a Robot Gripper with 3 Fingers?
Seeing all these robot grippers out there you may wonder, what are the advantages relative to the number of fingers presented...

The Most Fun or Useless Robot Applications?
Doing marketing in the robotic world is a tough business. In fact, I sometime feel that robots are doing boring, repeatable...

Are You Still Doubting Collaborative Robot Safety???
As I visit different shops and laboratories to discuss the potential of robotic integration, the major concern is always...
Q&As When Developing a Robotic Manipulation Cell (Part 1of 2)

Leave a comment