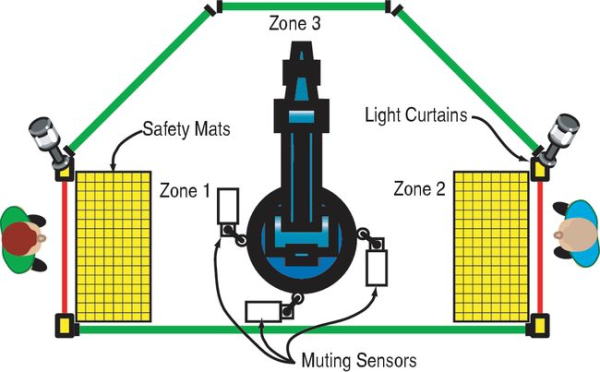

Lexicon of Collaborative Robot Terminology
The idea of standards is to try and harmonize usage across many countries and often fields of use. The standards are thus...


Industrial robots: What are the different types?
An industrial robot commonly refers to a robot arm used in a factory environment for manufacturing applications. Traditional...

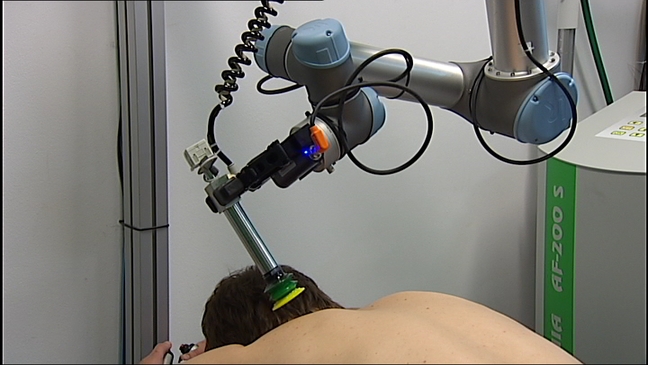
Robotic Physiotherapist: The Advent of Medical Robots
Medical applications using automation and robotixation are becoming more and more popular. For example, some patients need to...


What You Need to Look for in Machine Tending Automation
In industrial automation, when it’s time to automate a process it’s sometimes hard to know where to begin. There are plenty of...
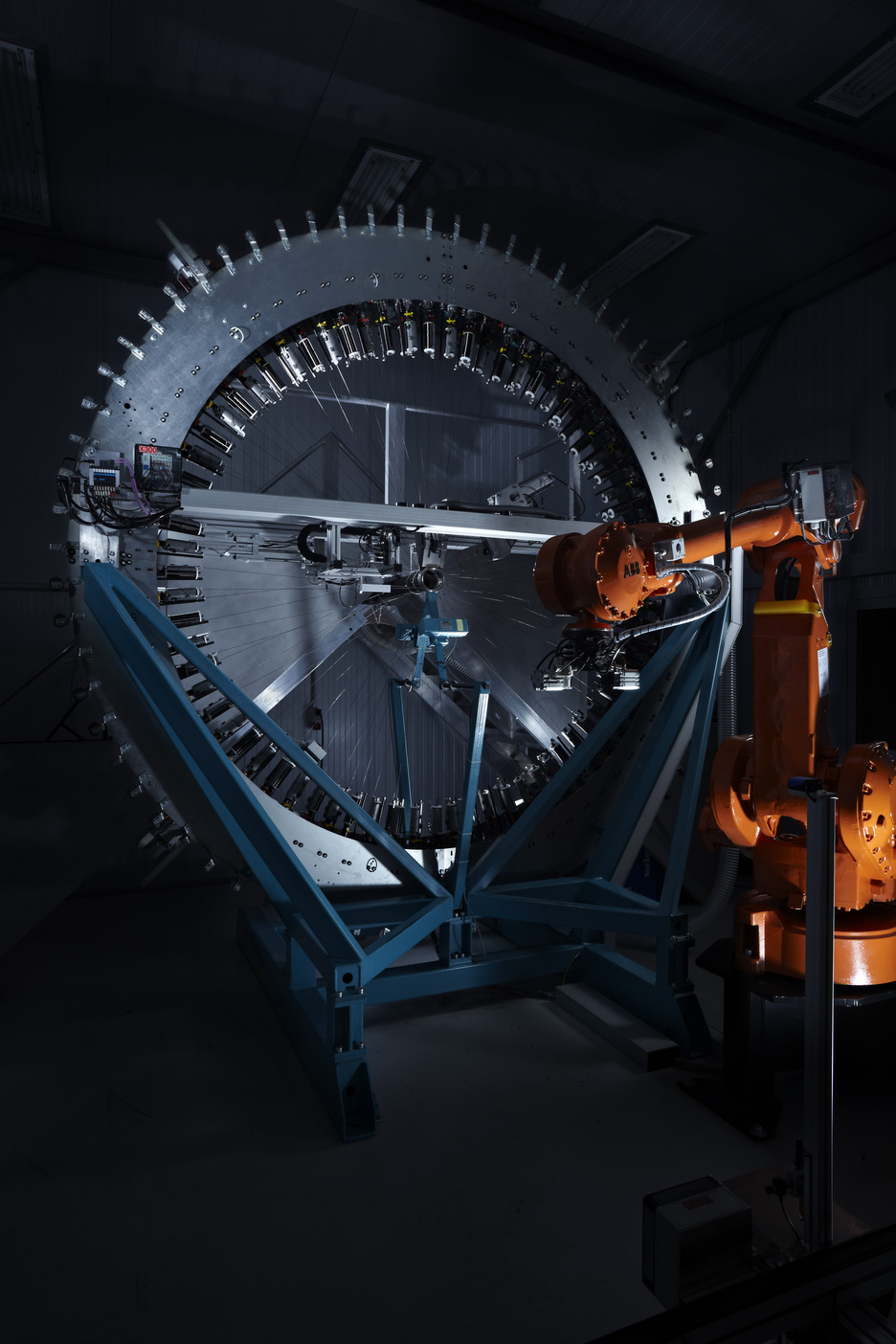
Unconventional Robotic Applications in Manufacturing: Road Bike Carbon Frame
These days, robotic applications are becoming popular in every aspect of manufacturing. Processes that were completely manual...

Top 5 Robotic Applications in the Aerospace Industry
The aerospace industry is known to be very conservative. Companies typically use successful assembly methods that have already...

How to Choose the Right Power Source for Robotic Welding Applications
Choosing the right robotic welding power source for your welding application can be confusing. There are not only many...

Robot Gripper Force Control
For high-mix robotic applications, having a single gripper which is able to adapt to different shapes and volumes can be very...


How Do Industrial Robots Achieve Compliance
In industrial robotics, the term compliance refers to flexibility and suppleness. To define what compliance is, the definition...
Leave a comment