

Artificial intelligence has brought enormous excitement to robotics.
Robots can now walk, navigate complex environments, and perform tasks that seemed impossible only a few years ago.
But there is a major gap between robot demonstrations and real industrial deployment.
A robot that works in a controlled research environment is very different from a robot that operates reliably on a production line.
This is the difference between physical AI and operational AI.
What is Physical AI?

Physical AI, sometimes called embodied AI, focuses on teaching machines how to interact with the physical world.
This includes capabilities such as:
- moving through environments
- detecting objects
- manipulating tools
- handling materials
Recent breakthroughs have made robots much more capable at movement and perception.
But interaction with the physical world remains extremely complex.
Robots must deal with:
- uncertain object properties
- changing environments
- unpredictable contact dynamics
These challenges make manipulation one of the hardest problems in robotics.
Why demonstrations are not enough
In robotics research, demonstrations often showcase impressive capabilities.
A robot may successfully complete a task in a lab setting.
But industrial environments require something more important than occasional success.
They require consistency.
A manufacturing robot must perform the same operation:
- thousands of times per day
- with minimal supervision
- without frequent failures
For many industrial applications, reliability targets reach 99.9% uptime or higher.
This level of reliability is what defines operational AI.
What operational AI really means
Operational AI refers to robotic systems that can function reliably in real production environments.
This requires more than intelligent algorithms.
It requires a complete system that includes:
- reliable hardware
- robust sensing
- predictable behavior
- easy integration
- maintainable systems
Lessons from Lean Robotics
One useful framework for thinking about deployment comes from lean robotics, a methodology developed to simplify robotic cell deployment.
Lean robotics focuses on four principles:
People before robots
Automation must be designed for the people who use it.
Robots should be easy to deploy, program, and maintain—not tools that require specialized research expertise.
Focus on robotic cell output
Automation should deliver measurable value.
The goal is not simply to install robots, but to improve:
- productivity
- reliability
- safety
Minimize waste
Unnecessary complexity slows down deployment.
Every feature, sensor, or component should serve a clear purpose.
Reducing system complexity often improves reliability.
Build your skills
Automation success depends on building internal knowledge.
Teams that understand robotics can adapt systems, troubleshoot problems, and expand automation over time.
These principles help bridge the gap between experimental robotics and reliable industrial systems.
Why hardware matters for reliability
Software and AI models often receive most of the attention in robotics.
But reliable automation depends heavily on hardware design.
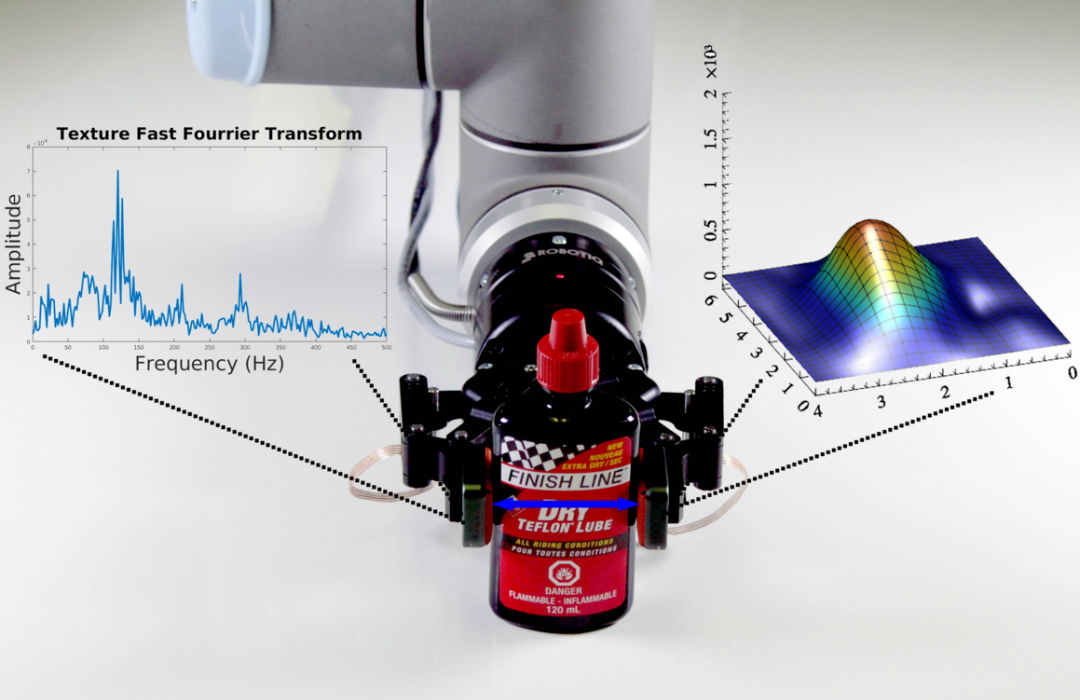
Robotic systems interact with the real world through components such as:
- grippers
- force torque sensors
- tactile sensors
- mechanical linkages
These components determine how the robot physically interacts with objects.
Well-designed hardware can:
- improve grasp stability
- reduce sensor noise
- simplify control algorithms
- increase system durability
In many cases, good hardware reduces the complexity that AI systems must handle.
Moving from demos to real automation
The robotics industry is entering a new phase.
Early excitement around AI-powered robots focused on demonstrations and prototypes.
The next phase will focus on scaling reliable automation.
Companies deploying robotics will prioritize systems that deliver:
- consistent performance
- predictable maintenance
- high uptime
- simple integration
This transition from physical AI to operational AI will determine which technologies succeed in real manufacturing environments.
Physical AI vs operational AI
The robotics industry is moving from capability demonstrations to reliable deployment.
Physical AI focuses on enabling robots to interact with the physical world using perception and learning.
Operational AI focuses on making those capabilities reliable enough for real industrial environments.
To reach operational AI, robotic systems must achieve:
- high reliability (often above 99.9%)
- durable hardware
- repeatable sensing
- easy integration into production workflows
This shift from experimentation to reliability will define the next phase of robotics adoption.
The future of robotics will be operational
AI will continue to push the boundaries of what robots can do.
But success in industry will depend on more than raw capability.
The robots that transform factories and warehouses will combine:
- advanced AI
- robust hardware
- reliable sensing
- thoughtful system design
Physical AI shows what robots can achieve.
Operational AI determines whether those capabilities can succeed in the real world.
Want to explore the full framework behind Physical AI?
Learn how mechanical design, sensing, and lean robotics principles help turn AI robotics demos into reliable automation systems.
Read the white paper: Giving physical AI a hand





Leave a comment