
-modified.png)
Medra Lab 001 is the largest autonomous AI-driven laboratory in the United States, operating continuously with robotics, AI, and adaptive grippers.
Medra Lab 001 never sleeps. It reads the literature, designs experiments, runs them, analyses the results, and decides what to try next — continuously, without a human at the bench.
Built across 38,000 square feet in under 90 days, it is already running in production with partners including Genentech.
This is Physical AI in its clearest form: software intelligence closing the loop on physical action, at scale, 24/7.
The problem worth solving

Despite two decades of lab automation, only ~5% of lab instruments are automated.
Medra’s answer is a Vision-Language-Lab-Action model, capable of operating more than 75% of existing lab instruments.
This system can:
- Perceive the lab environment
- Execute experiments autonomously
- Continuously improve experimental design
Applications already include:
- Antibody discovery
- Protein engineering
- Gene editing
- Cell biology
Scale that changes the equation
Medra Lab 001 is a production-scale autonomous lab, with:
- Hundreds of robots
- Full coverage of the design–make–test–analyse cycle
- Continuous generation of real-world physical interaction data
This matters because Physical AI systems depend on large volumes of consistent physical data, which is something most labs still cannot generate reliably.
Why the hardware choice matters in autonomous labs
In automated biology labs, robots must handle objects designed for human hands:
- Test tubes
- Well plates
- Pipettes
- Lab instruments with manual interfaces
This creates a core challenge:
Variability is constant.
Fixed tooling fails as soon as workflows change. And in high-throughput labs running hundreds of protocols, change is the norm—not the exception.
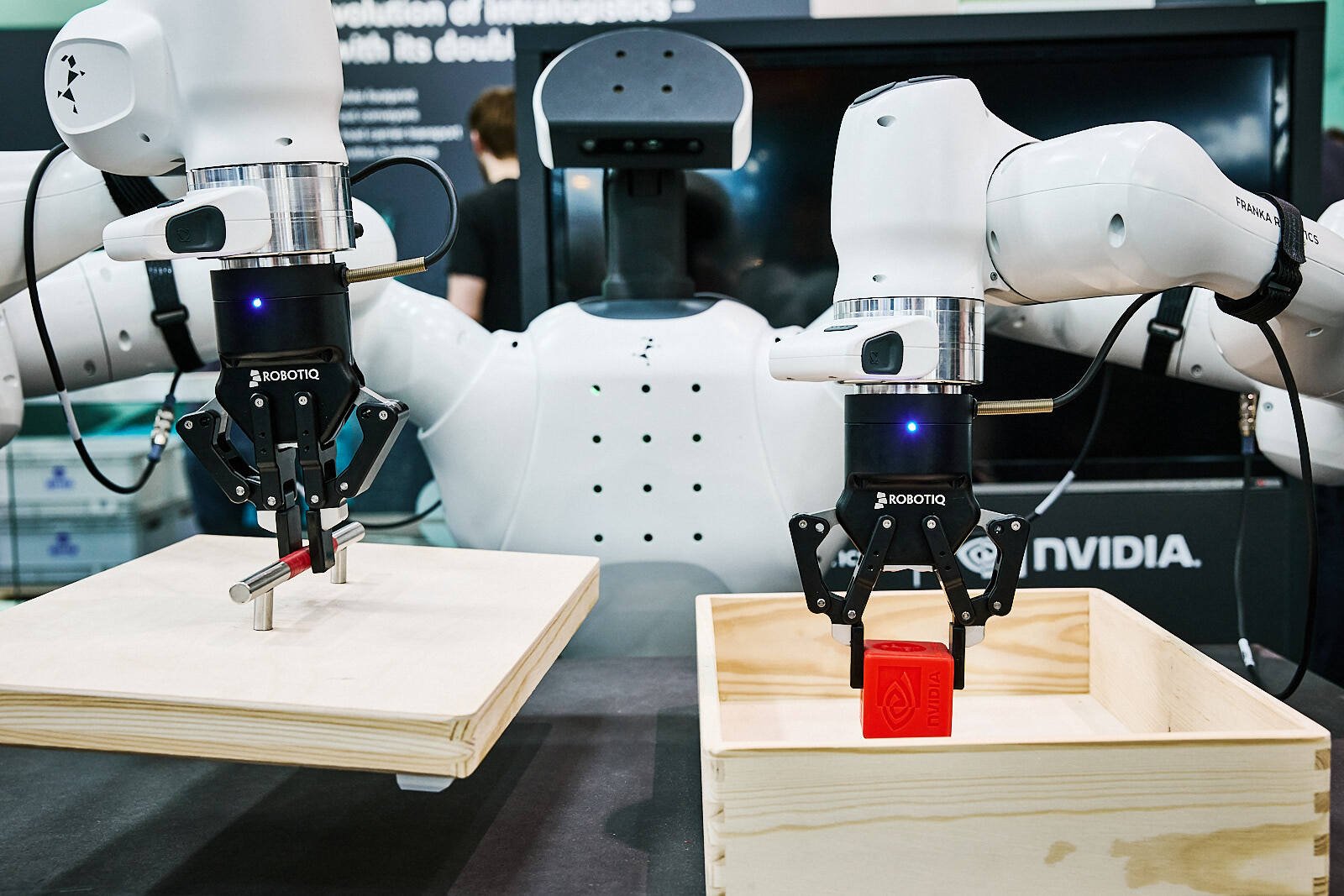
Why Medra uses Robotiq 2F-140 Grippers

Medra selected the Robotiq 2F-140 Adaptive Gripper across its robotic fleet.
This gripper enables:
- Handling of multiple object types without tool changes
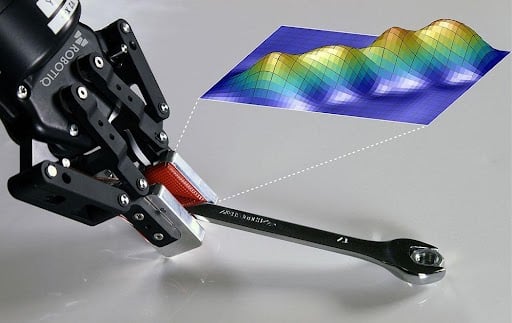
- Automatic force adjustment for delicate lab work
- Reliable performance across thousands of cycles
At fleet scale, this delivers a critical outcome:
Robots can operate continuously, without manual intervention or reconfiguration.
Why standardized grippers matter for Physical AI
For Physical AI systems, hardware decisions directly impact AI performance.
Using standardized end-of-arm tooling across all robots:
- Produces cleaner, more consistent training data
- Reduces integration complexity
- Simplifies maintenance at scale
This is a data strategy.
What Physical AI teams can learn from Medra
Medra’s system highlights three principles for building scalable Physical AI platforms:
1. Reliability drives data throughput
At scale, downtime limits how much useful data your system can generate.
Hardware rated for millions of cycles becomes core infrastructure.
2. Standardization compounds
Identical tooling across robots improves data consistency and reduces operational complexity.
3. Adaptive hardware reduces AI complexity
Grippers that handle variability mechanically reduce the burden on AI models—especially in high-mix environments.
Final insight
AI can design the experiments.
Execution is still physical.
And in systems like Medra’s, the hardware at the end of the robot’s arm is what separates:
- A promising demo
from - A platform running 24/7 in production
Talk to a Robotiq expert
Evaluating end-of-arm tooling for a Physical AI or lab automation application?
Whether you're:
- Scaling from pilot to production
- Handling variability in lab or industrial workflows
- Building AI-driven robotic systems
Talk to a Robotiq expert to get practical recommendations for your application.



Leave a comment