

Force torque sensors are used in research for many advanced robotic manipulations. At the same time, ROS is widely adopted by top academic and corporate research teams around the world. This is why we developed a ROS package for our recently released FT 150 Force Torque Sensor. This sensor and our other Robotiq devices can be programmed with ROS libraries.
How to use the FT sensor in ROS
-
The sensor is connected via the USB port of a computer. The signal has to be converted by a USB to serial port (RS-485). This converter is included when you purchase the FT 150 Sensor.
-
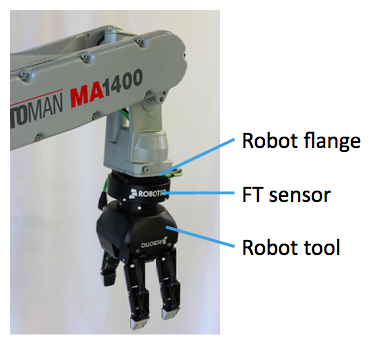
The Sensor measures the forces and torques applied to the tool (which is in turn fixed to the sensor).
-
The ROS package provides all the required code to read what the sensor measures and transforms it into usable date. The forces are shown in terms of Newtons (N) and the torques are shown in Newton/meter (N/m). These units are shown as float variables.
-
The ROS package publishes the data at a rate of 100Hz per topic. These topics are accessible by all the other ROS nodes.
-
The FT 150 Sensor package also provides a service that allows the user to 'zero' the sensor or provide a base referential reading. In fact, the program reads the actual value of force/torque as a reference and then shows the difference between the next value and the registered value.
Advantages
1.jpg?width=336&height=158&name=ros_industrial_logo(tm)1.jpg)
The ROS package makes it easy to use the FT 150 as a building block for your robotic application(s). In fact, in a couple of minutes, the sensor can be installed and ready to work with your robot. The user only has to follow the steps provided in the instruction manual.
ROS
''ROS was designed to be as distributed and modular as possible, so that users can use as much or as little of ROS as they desire. We'll cover what components make up ROS elsewhere, but the modularity of ROS allows you to pick and choose which parts are useful for you and which parts you'd rather implement yourself.'' -ROS maintainers
The other advantage of ROS is that since it is designed to provide a standardize method to communicate with all your different types of robots, it means less individualized programming and ultimately easier communications. If you want to get further information on ROS, check out the following links.
- Robotiq's Adaptive Robot Gripper Now On ROS Industrial





Leave a comment