

Aging Workforce Challenges for Businesses (and Solutions)
The workforce in manufacturing is aging rapidly. Baby Boomers, who make up a significant portion of the industrial labor force,...


My 8 Takeaways from Automate 2022
Three years ago, I was given by our friends at A3 a cool looking “Automate - Detroit 2021” t-shirt. Just like the caps they...
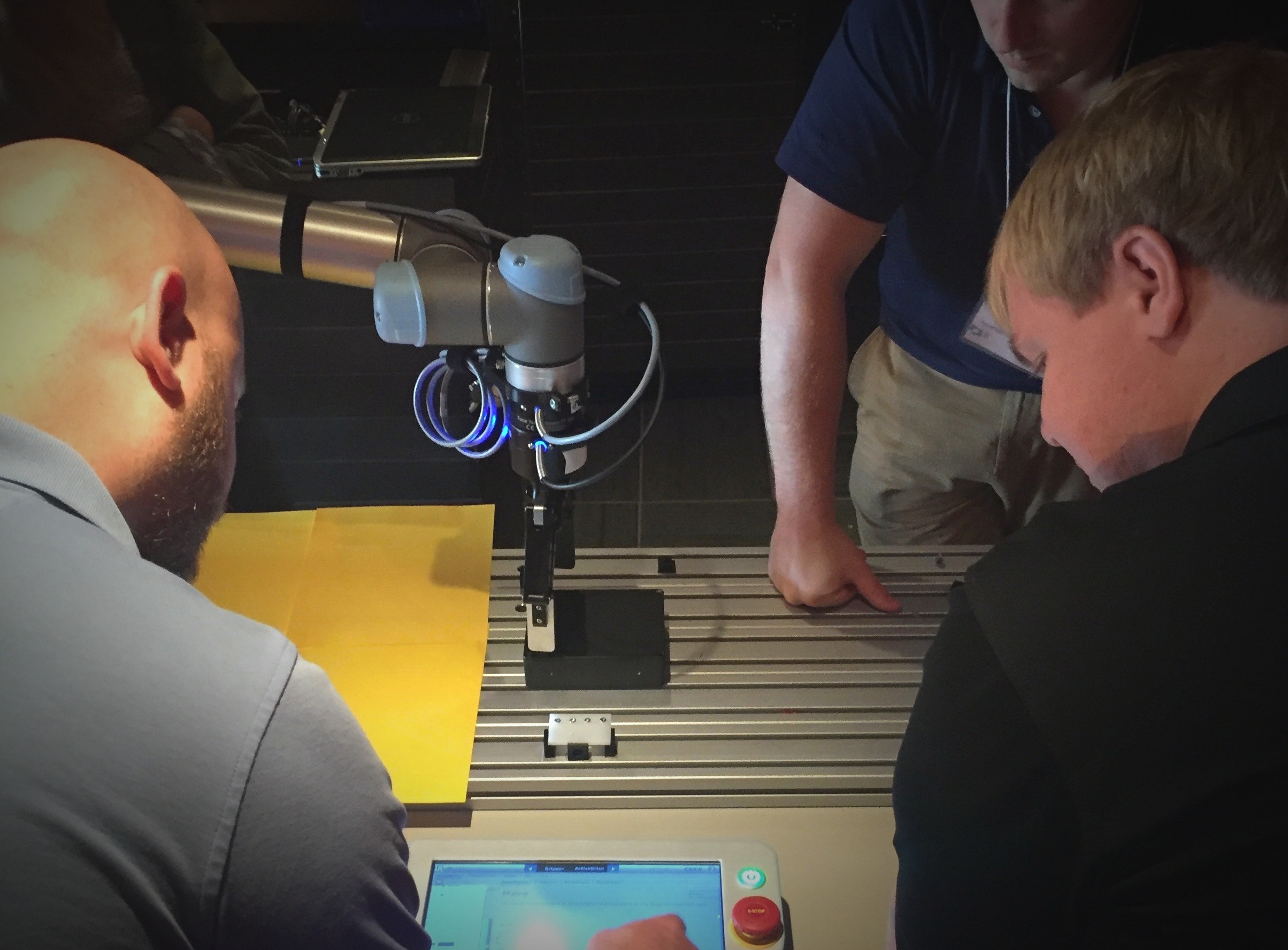
Now Is the Perfect Time to Develop Your Robotics Skills
The International Federation of Robotics recently discussed the high demand for “robotics skills” in post-corona recovery,...

You Want to Automate Now—Really?!
-
A fews months ago, we pulled the emergency brake on the world economy. After a few weeks of crisis management and making a...
Robotiq Gets a Can$31M Energy Boost from Battery Ventures
Maybe it's because I have had a training in physics but to me, money is energy. The more you have, the more you can make...

10,000 Hands Freed
Last week, on July 1, Robotiq turned 10. My cofounders, JP and Vince, and I started Robotiq to free human hands from tedious...

Aligning Forces in Canadian Robotics
Today, I have the honor to open the Stakeholder meeting and workshop of the Canadian Robotics Strategy event in Vancouver BC....

RoboBusiness 2016: Our Takeaways
We’re back from our yearly sync with the robotics industry happening at RoboBusiness. As usual, there were great talks and...

New Collaborative Robots at iRex 2015
We visited iREX 2015 this week at the Tokyo, Big Sight. It was great to be in robotland and to be immersed in Japan's point of...
Leave a comment