

Automate 2011 Robot Roundup
I am just back from a great week at the 2011 Automate Show in Chicago where we launched our Adaptive Gripper. It was fun to...

Read more 2 min read time
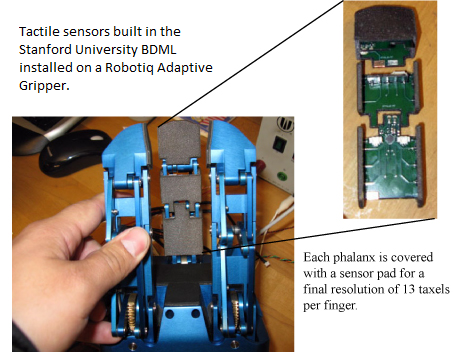
Tactile Sensors for Robotic Gripper
On the Robotiq Adaptive Gripper, you can control the overall force that you apply on a part. You can also detect that a...
Read more 1 min read time

How to Simplify Jigs in Robotic Welding Applications
In welding, jigs are used to precisely and firmly position parts while they are welded. The picture below shows such a jig.
Read more 1 min read time
Read more 5 min read time
Robotic Companies in Quebec
We met with many people in recent months. Here’s a list of the movers and shakers in Quebec robotics.
Read more 2 min read time
Plustech Walking Robotic Timberjack
Wow, my father and all old timer lumberjacks have gotta see this: a six-legged robotic timberjack that reduces damage to forest...
Read more 0 min read time
Honda Robotic Exoskeleton
Here’s a video on Honda's new product: a pair of legs supporting a bench you can sit and walk on. The legs support about 15% of...
Read more 0 min read time

Self-Adaptive-Robot-Auxiliary-Hand in Popular Science
Popular Science carries an article about SARAH (Self-Adaptive Robot Auxiliary Hand), because it’s part of Dextre’s toolbox....
Read more 1 min read time

Read more 2 min read time
Leave a comment