

Robot Gripper Force Control
For high-mix robotic applications, having a single gripper which is able to adapt to different shapes and volumes can be very...

ROS-Industrial: open-source software in industrial robotics
A couple years ago Southwest Research Institute (SwRI) released an open-source software package which brings industrial...
.jpg)
Robotiq's Adaptive Robot Gripper Now on ROS-Industrial
A few months ago, I wrote a blog post on ROS-Industrial, an open-source software in industrial robotics. From my experience in...
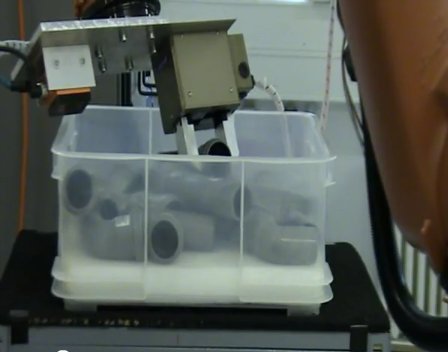
Performance Metrics for Robotic Randomized Bin Picking
In March 2012, the Performance Metrics for Intelligent Systems (PerMIS'12) Workshop was held at the University of Maryland....

The Right Gripper for the Kuka Lightweight Robot (LWR)
The Kuka lightweight robot is innovative in many aspects. Its low weight and capability to detect external forces applied on...

How to Verify Gripper Contact
Both of our Adaptive Grippers are able to grip objects of various shapes using their innovative finger mechanism. This allows...

How to Control the 2-Finger Adaptive Robot Gripper?
As explained in a previous article, the 2-Finger Adaptive Robot Gripper is able to achieve both pinching and encompassing...
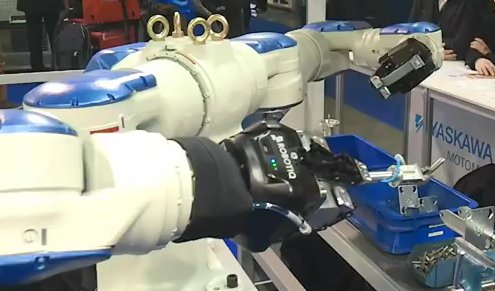
Dual Arm Robot Assembly with Adaptive Robot Gripper
During the Technishow 2012 which was recently held in the Netherlands, our partner Robomotive presented a fantastic demo of a ...
Leave a comment