

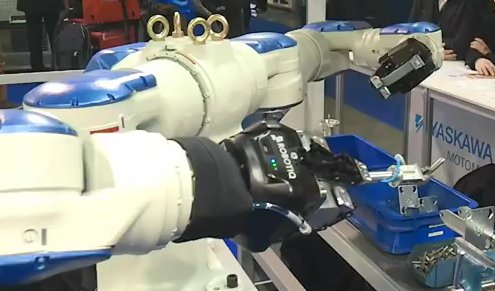
During the Technishow 2012 which was recently held in the Netherlands, our partner Robomotive presented a fantastic demo of a Motoman dual arm robot performing the assembly of cart wheels. As you can see in the video below, the robot is using our Adaptive Gripper at the end of each of its arms to pick up various parts and tools used in the assembly of the wheels. I like the video because it shows in many different ways how the assembly of small volume manufacturing products could be automated using flexible tools.
One Flexible Gripper for All Components
One key element to automize low volume assembly is to use as much reusable tooling as possible. Robots are great for that because they can be reprogrammed as many times as required by teaching new points. However, the end-effectors are often customized for each application. This often means that they are only cost effective when used on high volume productions. As shown in the video, the Adaptive Gripper is capable of picking up many different objets with different shapes (in this case brackets and cart wheels).
Grasping Standard Tools
The Adaptive Gripper can double as a flexible tool changer when specific tasks have to be performed. In the video, you can see for example the Gripper using a tiny pneumatic gripper to pick up small nuts before assembling them. At another point in the demo, the robot uses a similar tool to pick and assemble a bolt with precision. These small assembly components can be expected to be part of different products and therefore these tools would be reused. Also, the Gripper is capable (with its three fingers) to use tools which are also usable by a human. This is very interesting as it means that a robot could be temporarly replaced by a human worker during its maintenance/repair.
A Vision System for Random Bin Picking
I am no computer vision expert but I can certainly appreciate their usefulness in flexible automation. Think about it: if a "blind" robot is used for assembly, all parts need to be provided in a perfectly predictable and precise manner. This costs thousands in jigs and devices to feed the components, not to mention the time required to setup all of this. Now, imagine having a bunch of automated guided vehicles moving around the assembly plant to provide robots with bins filled with the required components. Sure, programming a robot to recognize and pick randomly placed objects can be quite complex (albeit possible, as shown in the Robomotive video). However, I am confident that in the near future this task will become easier as new expertise and software is constantly being developed.
Needless to say, this demo from Robomotive is stunning as it gives hope that we will see applications like this in real assembly plants in the near future. I'm always enthusiastic when I see innovations from companies such as Robomotive. Nice job, guys!




.jpg)

Leave a comment