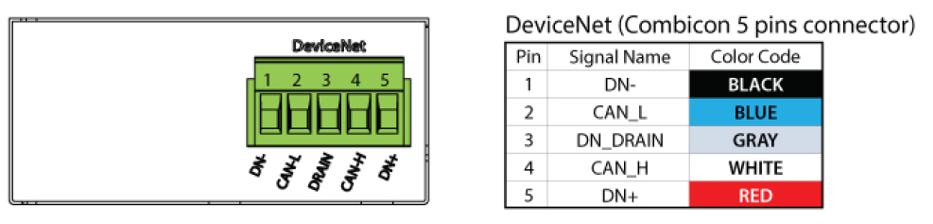

How to Configure a Robotiq Device with DeviceNet Communication Protocol
Robotiq specializes in robotic hardware devices. However, to take advantage of all the toolsavailable to configure your...

Robot Accuracy and Repeatability in Off-line Programming
This is a short introduction to the importance of robot positioning accuracy, which includes position and orientation...


What Are The Differences Between Ethernet and Ethernet/IP ?
The following article is written to clarify the confusion between Ethernet and Ethernet/IP. First, if you do not know what the...

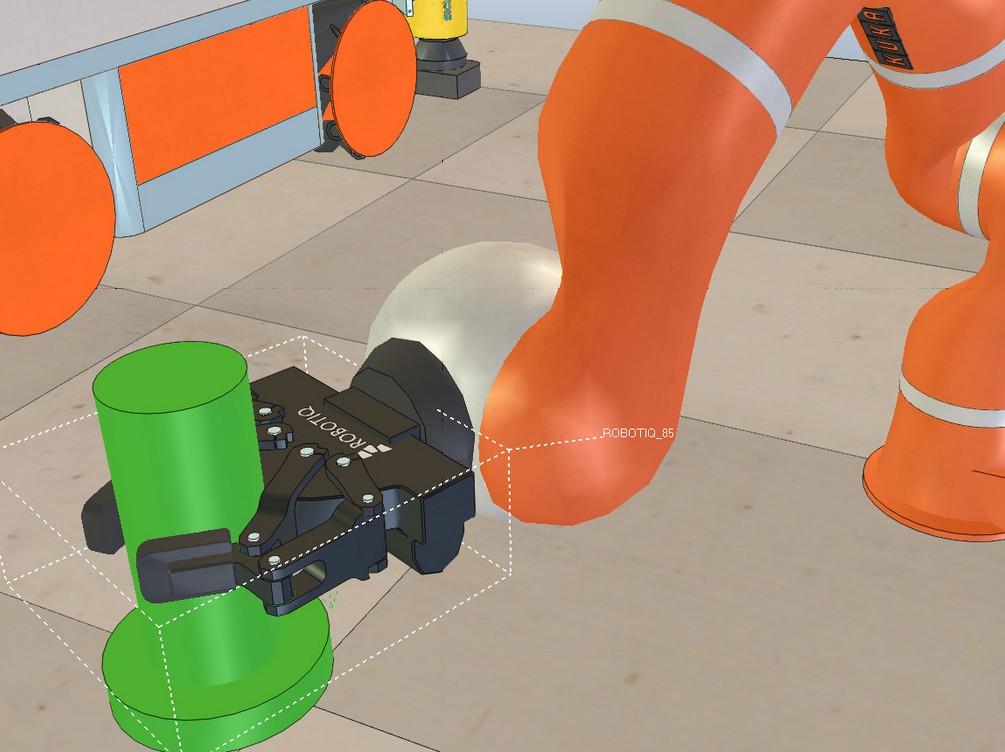
Robotic Simulation Software : V-REP
A lot of technologies have been developed over the years to robotize manufacturing processes. Today, there are many...

Using Modbus TCP on an Industrial Robot Controller
Modbus TCP (also called Modbus TCP/IP) is an open industrial communication protocol used to control devices over an ethernet...

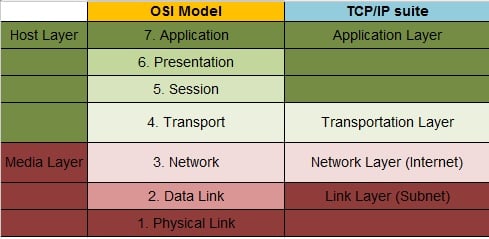
Communications Protocol Structures & Models
Communication protocols describe the set of rules to be used in communication exchange; each one having its own syntax,...
ROS-Industrial: open-source software in industrial robotics
A couple years ago Southwest Research Institute (SwRI) released an open-source software package which brings industrial...
Software Update for the Collaborative Robot Baxter
Robotic industries had big expectations for the first version of the collaborative robot, Baxter, launched in September 2012....
Leave a comment