

3 Trends in Robotics That Are Changing Manufacturing
Robotics is a field that is growing and evolving at an exponential rate. The year 2016 was a huge one for various fields of...

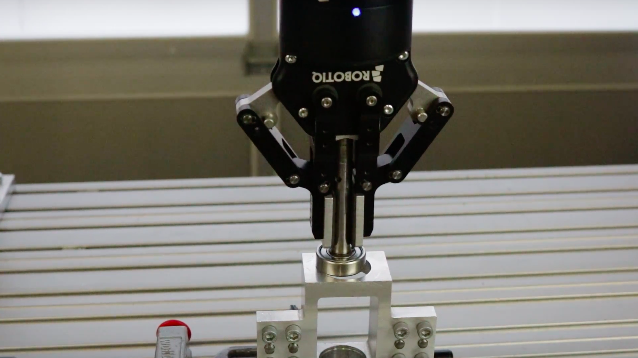
Start Using Force Feedback Loops for Insertion Applications
What's trending on DoF this week? Spiral search using FT300 Sensor, UR10 risk assessment, increasing the sensitivity of the...

New Robotic Vision Capabilities Break Down Barriers to Automation
Picking an object from a bin or unstructured pile has been an ongoing obstacle and deal-breaker for automation solutions....


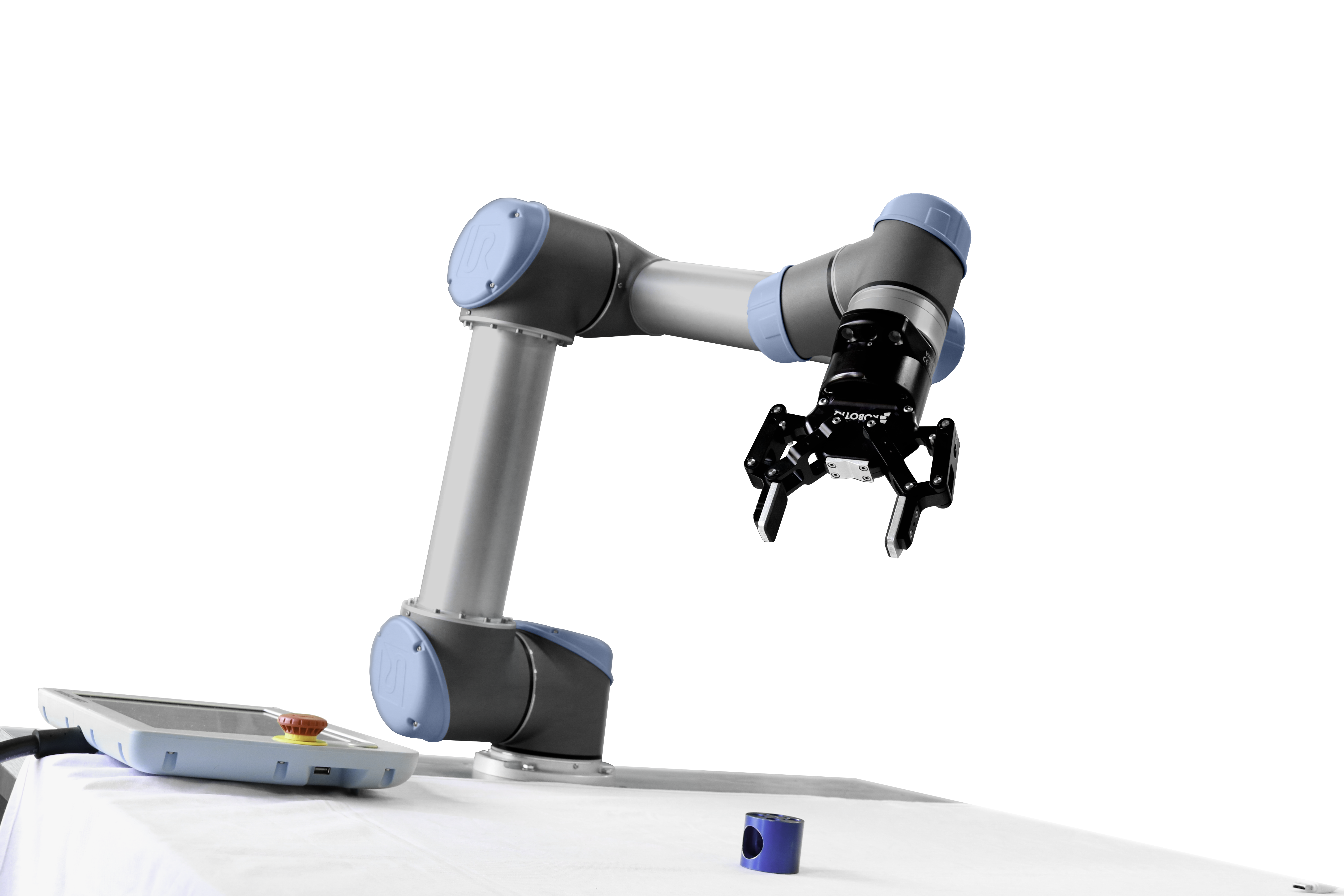
How to Benchmark a Robot Application in 10 Steps
You develop a new application for your robot, or modify an existing one. How do you know if you have improved the process?...


What Is Robot Benchmarking?
Technical industries often have well established benchmarks, but not robotics. We introduce some promising new benchmarks for...
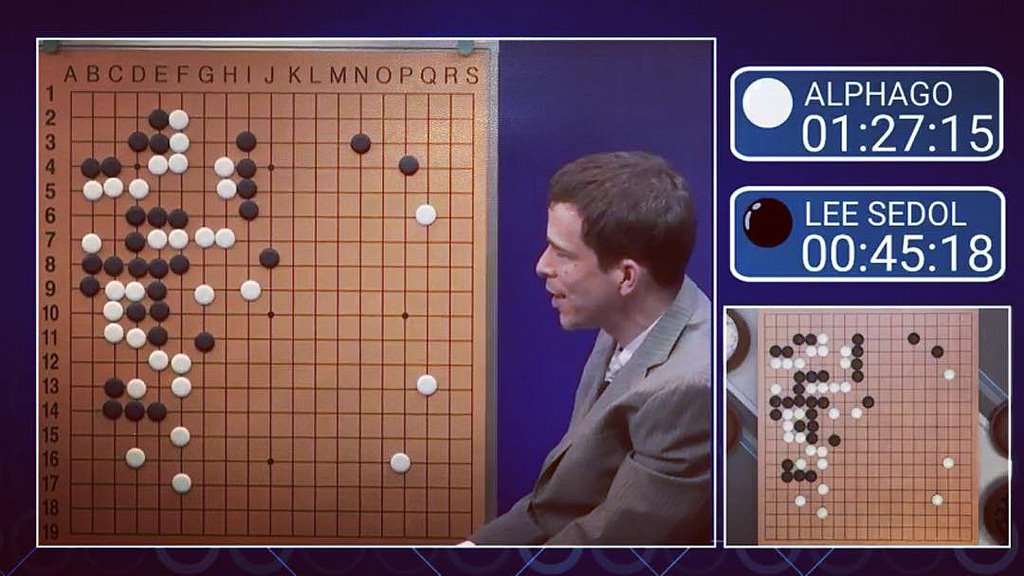
5 Applications of Machine Learning
As we move forward into the digital age, our technology continues to make leaps and strides forward. One of the newest...
What is the Best Programming Language for Robotics?
It's a question that a lot of new roboticists will ask at least once in their career. Unfortunately, it's also a question which...
2016 -- The Year in Robotics
As the holiday season draws closer, pull up a chair, pour yourself a warm drink, and join us for a quick recap of some of the...


Trending on DoF This Week - Dec. 15
What's trending on DoF this week? Case study with Claus Factory Inc., Wrist Camera URCaps UCC-1.1.1 update available for...
Leave a comment