

What is the best car? The answer really depends on what you need to do with the car: go to work, win a race or drive on unpaved roads to go fishing? What is the best robot hand? Well, what job does it have to accomplish with the rest of the system? We've already compared the Barrett Hand and the Robotiq 3-finger Adaptive Gripper. For industrial applications, what is the best robot hand?
Let’s say you could have a robot hand with the same properties as a human hand? Would it be the best hand to install on the current industrial robots? I don’t think so. The human hand is super flexible, it can do a myriad of things. But it is not the fastest, strongest, most repeatable, most robust hand, which is what is needed with the current way of doing things.
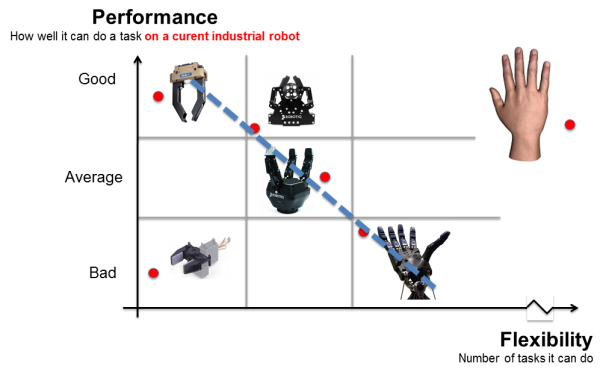
The above figure shows the position of different grippers and hands. The vertical axis is the performance if used on a traditional robot. Performance meaning strength, speed, accuracy, repeatability, etc. The horizontal axis is the number of different tasks that the hand can do.
On current industrial robots, there is a reason why simple pneumatic grippers are still the most widely used devices. They are strong, fast, repeatable, compact, reliable and cost effective. And the majority of robotic applications installed so far deal with a limited number of different parts.
One thing that we need to realize is that more flexibility usually means less raw performance in terms of grip force, speed and repeatability. As flexibility increases, going all the way to complex research hands (i.e. the Shadow Hand), performance decreases. The dashed line in the graph above shows the design tradeoffs. As more things are being automated, the industry is under pressure to push the boundaries to the right, have one robot systems do more different tasks.
Also, the meaning of "Performance on industrial robots" is evolving as new industrial robots are entering the field, such as Rethink’s Baxter or Universal Robots. This graph here could be drawn for manipulators instead of hands and it would look pretty similar. The traditional industrial robots would be at the top left and the new industrial robots would be at the center: less raw performance, more flexibility. So as robots targeting flexibility enter the market, they will also require more flexible grippers and hands.





.jpg)

Leave a comment