

What's trending on DoF this week? Spiral search using FT300 Sensor, UR10 risk assessment, increasing the sensitivity of the Gripper, gear insertion using FT300 Sensor and much more. Get the latest news from automation Pros!
Spiral Search Using FT300 Sensor
Did you know that the sensor can also be used in a force feedback loop for insertion or assembly type applications? Tyler_Berryman wrote a subprogram to use a spiral search to find a hole. This type of subprogram is very useful for applications that require a precise insertion or that have a vision component integrated with the cell. Take a look at the demo video here.
UR10 Risk Assessment
A Pro who is quite new to collaborative robotics and the TS 15066 norm needs your expertise. He must conduct a risk assessment on a particular application to determine necessary controls. Do you have an example of a risk assessment previously completed that you could share with Aaron?
Increasing the Sensitivity of the Gripper

Another Pro who is very new to robotics needs your help! She's working with a UR10 in combination with Robotiq's 2-Finger Gripper and FT150 Sensor. She extended the Gripper's fingertips and has difficulties detecting the object when picking it up. This is why she wants to figure out if there is another way to control the sensitivity, such as communicating with the the FT150 sensor directly. Do you have any suggestions?
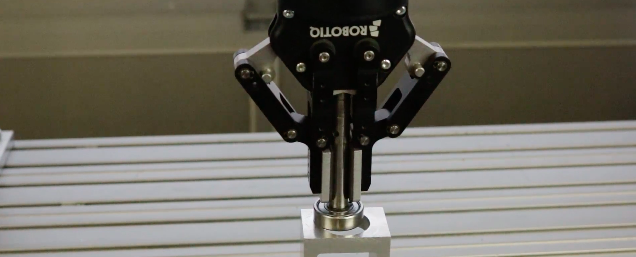
Gear Insertion Using FT300 Sensor
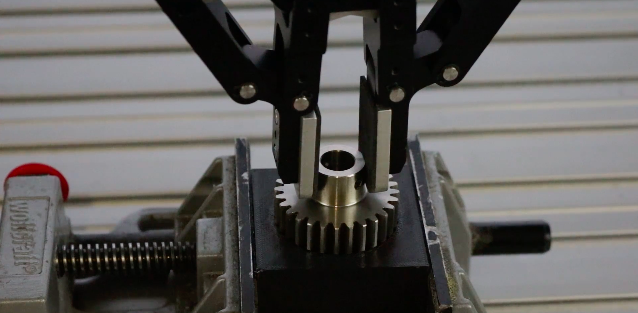
Tyler_Berryman worked on a proof of concept for a potential customer that might useful for similar applications that you may be working on. This potential customer wants to insert gears into a Go-NoGo jig using the FT300 Sensor. The fit between the gear and the jig is fairly tight, this is why the Force Torque Sensor is used to match the teeth of both the gear and the jig. Discover how he accomplished this here.
Standard Icons or Symbols for Robot Status
Can you help Karine_Simard? She is searching for a standard set of icons to represent different robot states, such as running, protective stop, emergency stop, etc. Let her know where she can find it!





Leave a comment