

Physical AI has moved past proof-of-concept. Large models, better simulation, and faster hardware have pushed embodied intelligence forward—but real-world manipulation is still the limiting factor.
Not perception.
Not planning.
Manipulation.
Robots can see the world with increasing clarity, yet still struggle to interact with it reliably. The reason is simple: vision-only systems don’t experience contact. And without contact, learning stalls.
Physical AI matters because it closes that gap. It connects sensing, decision-making, and action in the real world—where objects slip, deform, collide, and behave in ways simulation still cannot fully capture.
Touch is no longer optional. It’s the missing signal.
What physical AI actually changes

Physical AI is not traditional automation with a neural network bolted on. It is a shift in how robots learn and operate.
Instead of executing predefined trajectories, Physical AI systems:
- Perceive the world through different data - vision, tactile, proprioception and force
- Adjust behavior dynamically during interaction
- Learn from real-world outcomes rather than scripted success cases
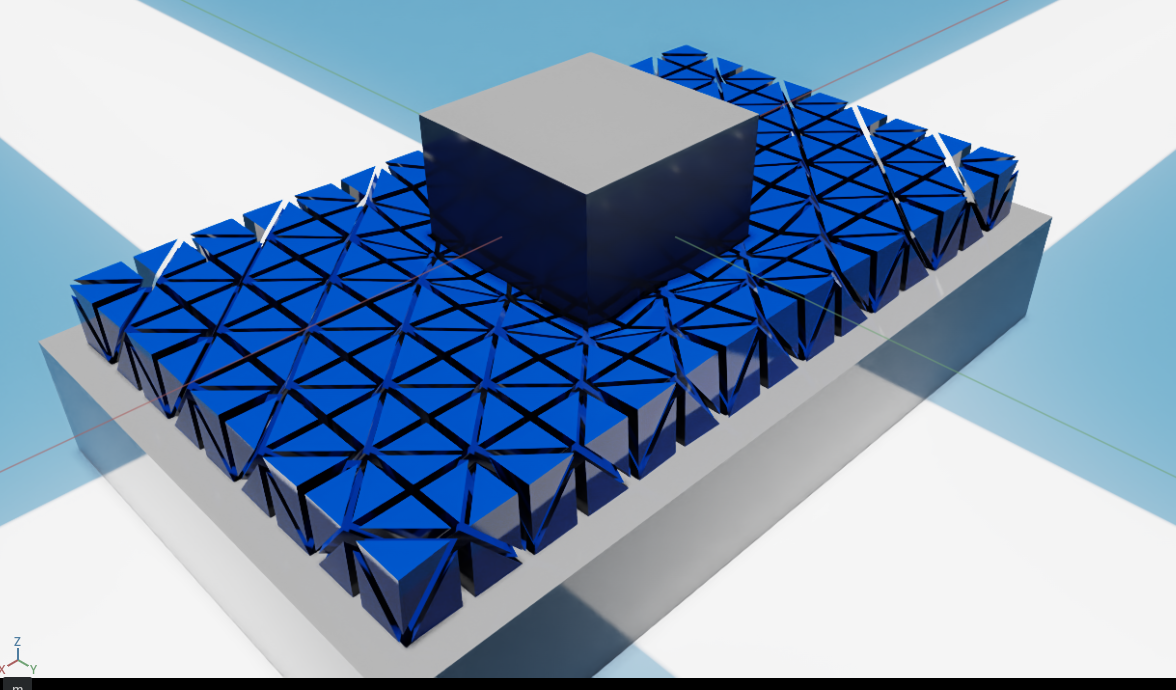
This matters most at the moment of contact—when fingers meet an object, when force distributes unevenly, when slip begins.
Those milliseconds define whether a grasp succeeds, fails, or generates usable training data.
Without tactile feedback, robots guess. With it, they learn.
Physical AI vs traditional automation
Traditional automation was built for repeatability. Known objects. Known poses. Known forces.
That model breaks down when:
- Objects vary in shape, stiffness, or surface
- Contact dynamics are non-linear
- The task space is large and underconstrained
To compensate, teams often add complexity upstream: tighter fixturing, constrained environments, or custom end-effectors designed for narrow tasks.
Physical AI flips that equation.
Instead of simplifying the world for the robot, it equips the robot to handle the world as it is.
That requires:
- Real-time contact awareness
- Continuous force feedback
- The ability to recover from partial failure rather than reset
The result is not just higher task success. It’s systems that learn from every interaction (success or failure) and become more capable over time.
Why vision-only manipulation has hit a ceiling
Vision excels at pre-contact reasoning: object detection, pose estimation, scene understanding. But once contact occurs, vision plateaus.
Occlusion increases.
Lighting changes.
Micro-slips and contact are invisible.
This is where many manipulation pipelines fail—not because the model is wrong, but because it’s blind at the most critical moment.
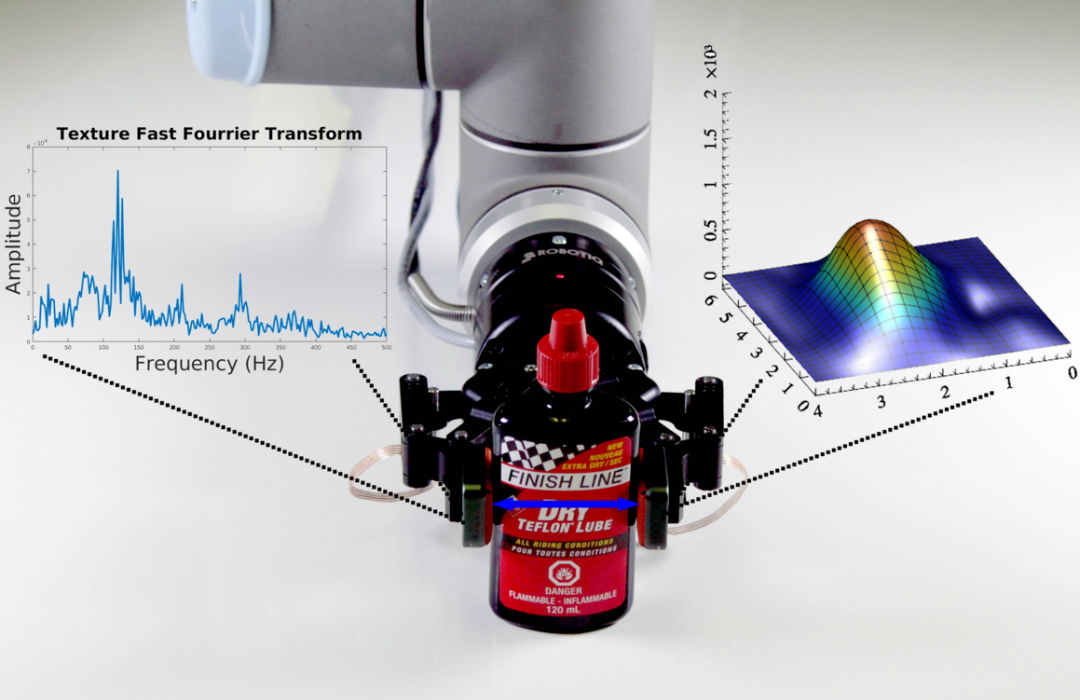
Tactile sensing provides signals vision cannot:
- Contact geometry
- Force distribution
- Slip onset
- Object compliance
For Physical AI teams, this isn’t about incremental improvement. It’s about unlocking learning regimes that were previously unstable, data-starved, or too costly to scale.
Digital AI vs physical AI in robotics programs
Digital AI has already transformed robotics development:
- Faster simulation
- Better planning
- Improved model training and evaluation
But digital AI operates one step removed from reality.
Physical AI is where models are stress-tested against physics, friction, noise, and uncertainty. It’s where sim-to-real gaps are exposed—and closed.
Digital AI helps decide what should happen.
Physical AI determines what actually happens.
Physical AI faces a challenge digital doesn’t: high quality real-world data.
Why tactile-enabled manipulation changes the economics
As fleets scale, new constraints emerge:
- Cost per robot
- Cost per datapoint
- Reliability across hundreds of identical stations
Custom grippers and bespoke tactile solutions often become bottlenecks. They fragment systems, slow deployment, and divert engineering effort away from core AI work.
A fleet-ready manipulation system does the opposite:
- Standardized hardware across stations
- Increased uptime
- Reduced maintenance costs and time
- Known performance envelopes
- Repeatable data characteristics
Adding tactile fingertips to proven industrial grippers shifts the trade-off. Teams gain access to rich contact data without absorbing the cost, fragility, and maintenance burden of fully custom hands.
For humanoids, the benefit is immediate:
- More stable grasps
- Better slip recovery
- Useful contact feedback without anthropomorphic complexity
For Physical AI labs, the impact compounds over time:
- Higher data throughput per robot
- More consistent learning signals
- Faster iteration cycles
What this means for Physical AI teams
Physical AI is not about building the most human-like hand. It’s about building systems that can learn reliably in the real world.
Touch enables that learning.
Consistency enables scale.
Robust hardware enables both.
As Physical AI programs move from isolated demos to fleets, the question is no longer can this robot grasp an object?
It’s:
- Can it do it thousands of times a day?
- Can it generate consistent, usable data?
- Can the system scale without collapsing under its own complexity?
That’s where tactile-enabled manipulation stops being a research feature—and becomes infrastructure.




Leave a comment