

Also read NVIDIA's COMPUTEX coverage, where Robotiq appears alongside the latest Isaac GR00T updates.


Robotiq has released the digital twin of its TSF-85 tactile sensor in NVIDIA Isaac Sim, the first industrial-grade tactile sensor digital twin shipping on a commercial collaborative gripper. Tactile sensing promises to accelerate robotics, but its adoption has been limited by the lack of data from industry-ready hardware and accurate simulations. Model builders can now train contact-rich manipulation policies in simulation, then run them on the same physical sensor designed to operate reliably on the factory floor.
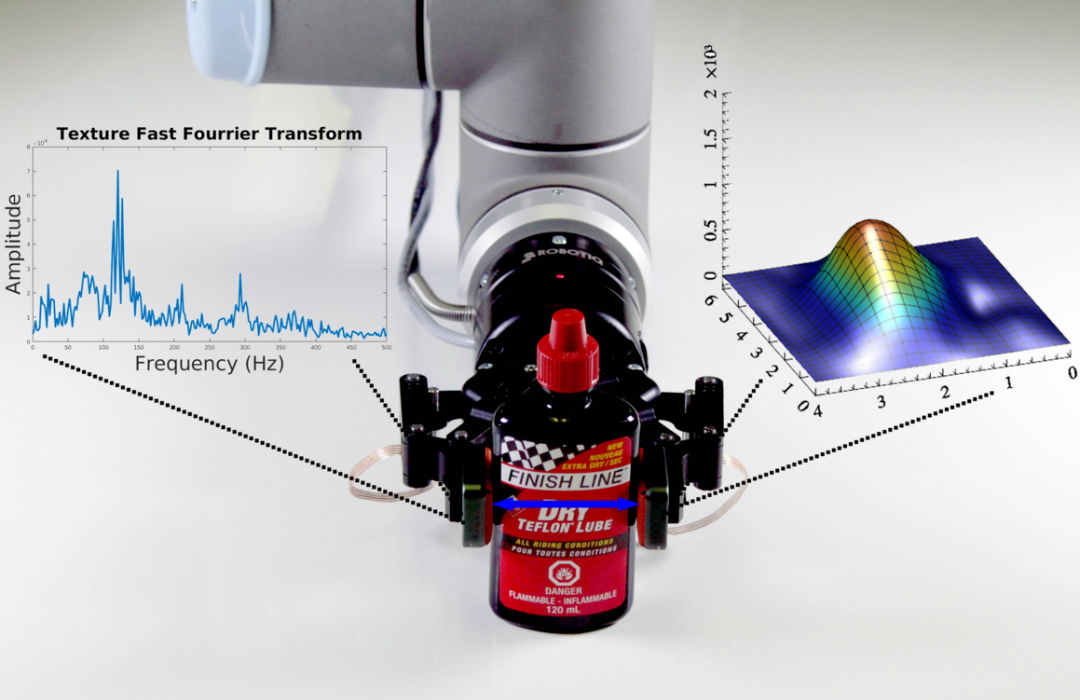
Most tactile sensors rely on a deformable contact interface. The very property that gives them sensitivity is also what makes them difficult to simulate. Deformable body simulation is technically demanding, and that is one reason accurate tactile digital twins have lagged behind in the Physical AI stack. The TSF-85 digital twin is built around that constraint. It generates synthetic tactile maps through a custom Isaac Sim UI panel, visualizes them in real time, runs data generation at the simulation refresh rate, and exports to HDF5 for downstream training pipelines.


The TSF-85 digital twin was developed by the CoRo Lab (Laboratoire de commande et de robotique) at École de technologie supérieure (ÉTS) in Montréal, a long-time research partner of Robotiq — a collaboration led by Associate Professor Jean-Philippe Roberge and doctoral researcher Berith Atemoztli De la Cruz Sánchez.
The simulation method behind the digital twin is documented in two peer-reviewed publications cited in the GitHub repo. The first, published in Frontiers in Robotics and AI (2025), draws on a dataset of 53,400 real-world tactile maps to train, validate, and test each simulation pipeline — achieving up to 97% Structural Similarity Index Measure (SSIM) for the hyperelastic model and 90% SSIM for the elastic model on 12 unseen objects. A companion paper at ICCRT 2025 releases an open dataset of 46,200 real and synthetic tactile samples, including data collected using a 2F-85 Robotiq gripper and synthetic samples generated in NVIDIA Isaac Lab.
Simulation accuracy matters, but it only helps if the real sensor remains stable over time. The TSF-85 has been tested through 2.3 million cycles at maximum gripper force, with no significant variation in the output of the tactile signals. This means models trained on its tactile data can continue to rely on consistent signals for edges, shapes, textures, and geometry even after demanding real-world use.
Robotiq has been the go-to components provider for both academic research labs and industrial production for more than a decade. That dual footprint is exactly the bridge Physical AI requires: research-grade flexibility and industrial-grade reliability in the same hardware platform.
The digital twin supports NVIDIA Isaac Sim 5.1 and is available now on GitHub: https://github.com/Lab-CORO/TSF-85. Learn more about Robotiq's physical AI stack at https://robotiq.com/physical-ai




Leave a comment