

Assessing the risks of a collaborative robot is a complex process. It involves many different risks, probabilities, and – most importantly – devices. And it's sometimes hard to get all the safety data for each device.
In this article, we'll give you a few tips on evaluating our 2-Finger Gripper.
What is a risk assessment for collaborative robots?
Before we discuss the 2-Finger Gripper, I strongly suggest reviewing the following documents. They'll teach you exactly what a risk assessment is and how to perform one:
How do you evaluate risk?
When analyzing risk, you need to evaluate each of the potential risks and rank them on a standardized scale.
We use four different factors to qualify a risk:
- Degree of Possible Harm (DPH)
- Possibility of Occurrence (PO)
- Possibility of Avoidance (PA)
- Frequency of Exposure (FE)
All these factors have different levels attached to them. Once each factor has been evaluated, we use this formula to obtain the hazard rating:
HR = DPH x PO x PA x FE.
The risk assessment template (that we linked to above) provides more details on the points accorded to different criteria. For example, Degree of Possible Harm is determined as follows.
Degree of Possible Harm (DPH):
0.25 Scratch or bruise
0.5 Laceration, cut, mild ill-health effect, or minor burns
3 Fracture of minor bone – finger/toe
5 Fracture of major bone – hand/arm/leg
8 Loss of one or two fingers/toes, or major burns
11 Leg/hand amputation, or partial loss of hearing/eyesight
15 Amputation of two legs/hands, or total loss of hearing/sight in both ears/eyes
25 Critical injuries or permanent illness, condition, or injury
40 Single fatality
65 Catastrophe
Taken from Pilz Hazard Rating; Risk Assessment eBook
If you need more information on what type of impact or force level will cause injuries, refer to the ISO/TS 15066 standard.
When all the criteria have been calculated for each risk, you can estimate whether the risk is acceptable, or a critical one that must be reduced.
Again the risk evaluation scale is available in the Risk Assessment for Collaborative Robot template. With that covered, let’s get into the details of the 2-Finger Gripper specifically.
What are the potential risks of the 2-Finger Gripper?
We have identified four main risks to using the Gripper:
- Crushing of a body part when the fingers close
- Crushing of a body part when the gripper hits a surface (semi-static impact)
- Transient impact during robot movement
- Entrapment of a body part in the open finger linkage
Transient impact vs. semi-static impact
What's the hazard rating for each risk?
Here we'll do a risk evaluation for each of the identified risks.
Please keep in mind that there are many more risks that could be involved. Proper risk assessments always have to consider all the different devices and actions of the robotic cell.
That being said, let’s proceed with our "mini" risk evaluation.
Crushing of a body part when the fingers close
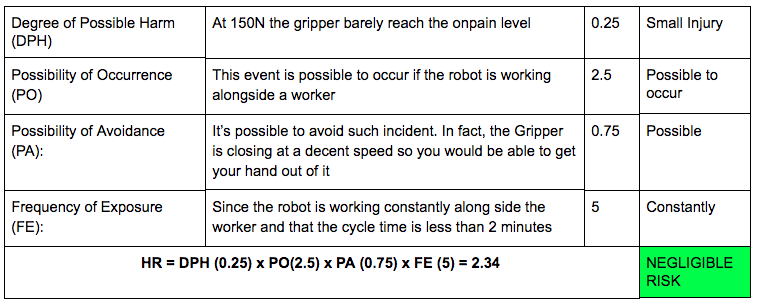
This hazard is rated a negligible risk on the Pilz Hazard Rating.
Safe Pressure Level
Crushing of a body part when the gripper hits a surface
Note that in this case, the pressure level may be higher than the force level. You may need to calculate the area where the force is applied and translate it into pressure.
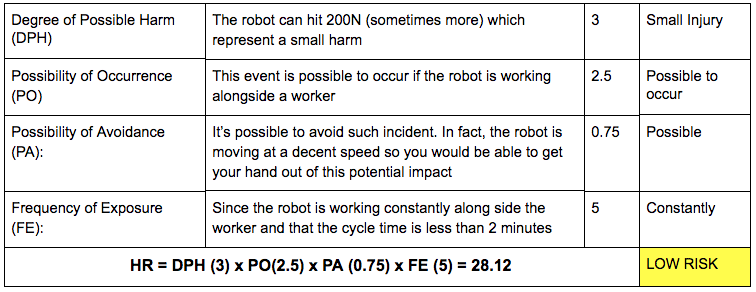
This hazard is rated a low risk on the Pilz Hazard Rating.
Transient impact during robot movement
In the ISO/TS 15066 we can see that the pain threshold is two times higher during a transient impact than during a semi-static impact. That means the user can be hit with twice as much force during a transient impact as during a semi-static impact, and feel the same level of pain. That being said, the degree of possible harm at the same force level is a lot lower.
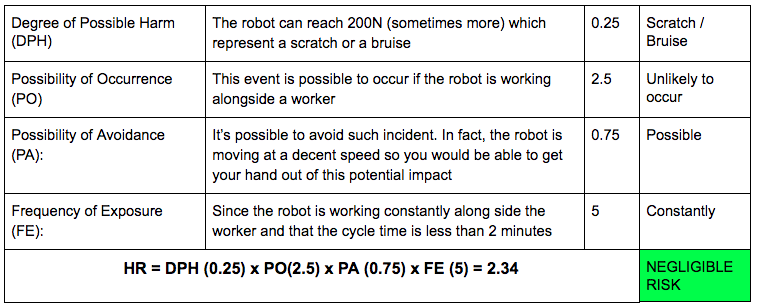
This hazard is rated a negligible risk on the Pilz Hazard Rating.
Entrapment of a body part in the open finger linkage
Entrapment in the mechanical linkage is quite hard to quantify in terms of injury or pain level. We will estimate that a small fracture can occur.
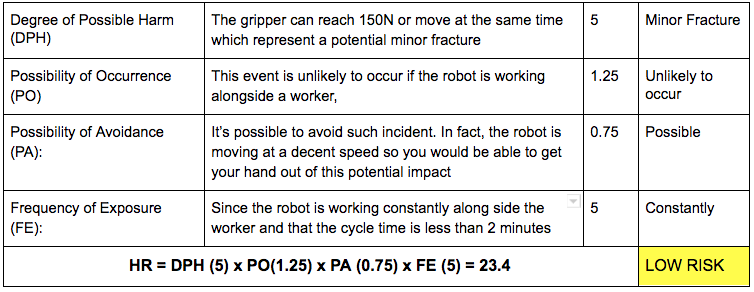
This hazard is rated a low risk on the Pilz Hazard Rating.
In order to reduce that risk, Robotiq offers protective covers that can cover all the open finger linkages. Use of these covers lowers the possibility of occurrence (PO) to Almost Impossible (0.05), which reduces the HR to 0.93.

Covers for the Robotiq 2-Finger Adaptive Robot Gripper
As you might have noticed, our analysis concludes that the 2-Finger Gripper presents no major risks. However, the risks we presented here are merely examples of what can happen – they are not an exclusive list.
There are plenty of other risks involved in using the Gripper and robot. Download our eBook to learn more about how to evaluate them.





.jpg)

Leave a comment