Context:
Bounding boxes are used in Robotiq’s Palletizing Solution to define collision areas for debugging and validation. The online configurator provides an efficient way to design these boxes, export them as JSON, and integrate them into your robot program. The function rq_register_bounding_box() is then used to register them in the application.
This article is a simpler and robuts method to perform bounding box creation
Information:
Reminder: Function to Use
rq_register_bounding_box(referential, position, dimensions)
Details on this function can also be found in the script sheet, included when downloading URCaps from Robotiq Support. here an article to explain how to find it :
https://blog.robotiq.com/knowledge/where-to-find-advanced-script-sheet-for-palletizer
Creating a Bounding Box with the Online Configurator
-
Open the configurator and load your layout
-
Go to Component
-
Click on + and select Bounding box
-
Place the bounding box with the required referential, size, and orientation
-
Copy the JSON output generated
Here’s a video on how to create and export a bounding box: https://share.robotiq.com/public/4fadf

JSON Example
Below is a raw JSON example generated by the configurator:
“{ "allowPathSearch": true, "boundingBoxes": [ { "parentName": "Floor", "pose": [ 0.85, 1.1, 0, 0, 0, 0.4363323129985824 ], "dimensions": [ 0.4, 0.3, 2.5 ] }, { "parentName": "RobotFlange", "pose": [ 0.21, 0, 0.1, 0, 0, 0 ], "dimensions": [ 0.002, 0.3, 0.2 ] } ] }
Adding Bounding Boxes to the Program
Integrate the bounding boxes using rq_register_bounding_box() In the before the start sequence of your program.
We use the position and dimension that are in bold letters from the JSON
Example:
-
Pilar
rq_register_bounding_box(0, p[0.85, 1.1, 0, 0, 0, 0.4363323129985824], [0.4, 0.3, 2.5])
-
Gripper side
rq_register_bounding_box(3, p[0.21, 0, 0.1, 0, 0, 0], [0.002, 0.3, 0.2])
Illustration :
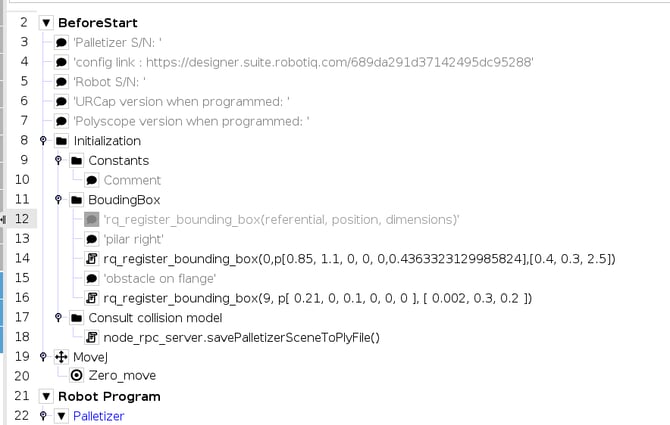
Program link : https://share.robotiq.com/public/a7516
Validation and Debugging
-
Use Collision Consultation to validate the position and size of bounding boxes in the robot’s virtual environment.
-
This method should be applied only during debugging.
-
Once your program is functional, remove the bounding boxes to optimize performance.

Conclusion:
The online configurator provides a fast and precise way to define bounding boxes for debugging collision models in palletizing applications. By exporting the JSON and registering it in your program, you can validate and refine collision handling before moving to production.