Use “Collision Consultation” to confirm positioning and sizing of collision boxes you’ve added to your palletizer’s virtual environment. This is a debug-only feature and must be removed once the program is running smoothly
Purpose
Collision Consultation helps you visualize the collision scene directly from the robot’s environment. It’s useful during development to confirm custom obstacles—like walls or ceiling—are correctly modeled.
Generating the Collision Scene
-
Insert the following line into your program where you want to capture the model:
node_rpc_server.savePalletizerSceneToPlyFile() - Run the program to generate and save the scene, then stop it.
The robot saves a.plyfile at:
/tmp/ucs/rq_xmlrpcserver/palletizer_collision_scene.ply
Note : this should only be used to debug an application. Once the program is operational, the function should be removed or suppressed to avoid potential issues
In this example i save the scene in the before start : 
-
Exporting the Collision Model to USB
-
Insert an empty USB key into the teach pendant.
-
Run the program with the
node_rpc_server.savePalletizerSceneToPlyFile()command. -
After completion, find a log folder on the USB drive. The path may vary, e.g.:
collision_scenes\20246900152\20250107_223254\ucs_rq_xmlrpcserver_logs\
palletizer_collision_scene.plyfile within this folder
-
- On your USB stick, there will be a log folder.
- Go to this directory to access the collision scene (Number can vary) collision_scenes\20246900152\20250107_223254\ucs_rq_xmlrpcserver_logs\
- Visualize the collision scene named palletizer_collision_scene.ply with a software such as Meshlab
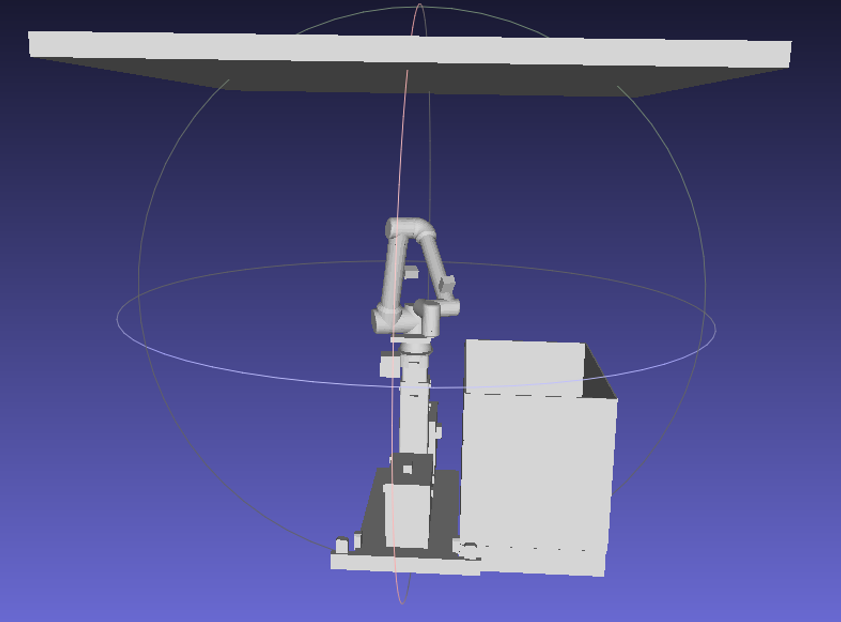
I can check if my collision boxes are correctly placed (here wall around pallet + ceilling =ok) :
or here in this program example if pilar and grippe rare ok :
https://share.robotiq.com/public/a7516

Direct connection methods
You can also use direct connection sftp on the robot to access files, logs and collisions here a screenshot with Filezila :
/root/robotiq/logs/ucs/rq_xmlrpcserver
