

When designing any kind of mechanical device, you need to consider the context where it will work. Designing custom fingertips for your grippers will, for sure, follow this rule. Even though some designs might be revolutionary, if they don't fit the application or correspond to the context, they are generally pretty useless. Here are a couple of tricks and tips that you should consider while designing custom fingertips for your gripper.
Most of the time modifications or the total redesign of fingertips will be really useful for the ''pick and place'' operations. In fact, if the robot gripper is grasping a given part to transport it somewhere else. You want to have custom fingertips for 2 main reasons: First, because you want to grasp a wider range of parts. Second, you want to have a highly secure grip on a part. In both cases you have to consider the parts that will be grasped, the gripping context and the way the part is presented to the gripper. Note that the example used for this blog post will be with Robotiq products, since we have more technical experience and details for these products. However, the following information can be adapted to any gripper out there.
Handled Part
Part parameters such as weight, size and material must be considered in the first step of the design phase since it will limit some design options.
Part Weight
The weight of the part can be extremely limiting in some cases. Probably you have looked to make sure that you have the correct payload for the weight of your part, you may also want to consider the torque applied on the finger base. In fact, even if your part is within the gripper's normal payload, grasping the part with the tip of a long finger will create a larger torque on the finger and can create damage or make the gripper run abnormally over the long run.

So as presented in the figure above, the torque at the finger base will increase if the force (F_1 vs F_2) is applied away from the rotating point (T_act). Since there is some mechanical limitation to the torque that can be applied at the finger base, the force (or part weight) should be consider in your design in order to respect the mechanical limitation of the robot gripper.
Part Dimension
 We have seen a lot of fingertip modifications or designs due to geometrical issues. In fact, to adapt the fingertips to the part that will be grasped, you want to know what this part will look like. If the part is round, for example, you may want to secure it using a ''v-shape'' fingertip.
We have seen a lot of fingertip modifications or designs due to geometrical issues. In fact, to adapt the fingertips to the part that will be grasped, you want to know what this part will look like. If the part is round, for example, you may want to secure it using a ''v-shape'' fingertip.
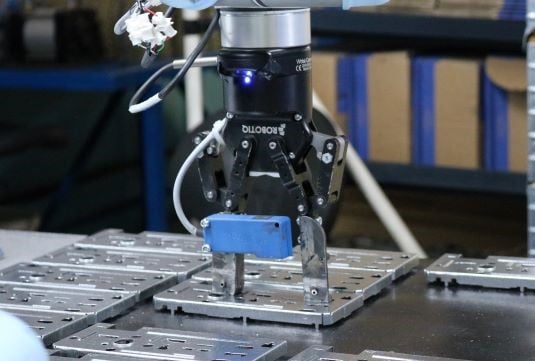
In machine tending operations, customers often want to use the same gripper to do several operations. In this case, raw material will be placed in the CNC machine with a regular (round or square) shape and will come out in a totally different shape. This is the reason why some fingertips are designed to grasp different types of parts. The pictures here show one of our fingertips that is designed to grasp different kind of cylinders in 2 different axes. The fingertips can also grasp flat/square geometries.
Part Material
Some applications out there will require a gentle prehension process because of the fragility of the part. In those particular cases, you may want to add rubber covers on the fingertips. Notice that our 3-Finger Adaptive Gripper and 2-Finger 85 Adaptive Gripper both have the option to come with rubber pads. This allows you to grab the part with a lower force and still be able to retain the part since the friction coefficient is higher than straight aluminum. Some of our customers have even increase the thickness of the silicone to add compliance to the gripper. In this situation, you can then grab the part with a little offset and the rubber will compensate for the positioning offset.
You may also want to consider the surface texture of the material in your design. You can't use rough fingertips if you are handling a super polished part.

Process
Robot motions are your biggest concern in the process analysis. If the robot program is using high acceleration/deceleration rates you may want to secure your part more firmly in your gripper. There are basically two different ways to do this. Either by increasing the force applied on the part by increasing the friction coefficient of the part against the pad or to mechanically secure the grasp.
So by increasing your fingertips friction coefficient (C_f), you can manipulate a bigger weight (W) for the same applied force (F). As I said in the previous section, thicker rubber padding can be used to give more compliance and increase the friction coefficient.
The other way to do this is to mechanically retain the part in the gripper, you can use the encompassing grip for this. However only some parts can use the encompassing gripping mode. This is why you should recreate this gripping method with the fingertips. Some customers have used this same principle in the design of their fingertips. In other words, the 4 minimum points of contact that are used to secure the part in an encompassing mode are replicated on the fingertips. So basically a ''v-shape'' or a rounded shape can surround the part and secure it.

Part Presentation
This aspect is mostly limiting the outside geometry of the fingertips and gripper itself. As you might want to grab some parts from a given position you have to consider what is surrounding the part. Is this going to be a super packed card board? Does the part present itself in a narrow hole and do you need tiny fingertips to get to it? This is a really important aspect to observe. I can tell you that we have had more than one client who asked us to design fingertips to grasp some specific part, and that as we were designing the fingertips we realized that the part wasn't even reachable. This could be a big waste of time and energy and this is why I'm suggesting that you consider your part surroundings. Don't forget to analyze the ''dropping'' area, too. If the gripper is doing packaging, what are the specifications for the material and area that will be used for the packaging.
These are some of the main aspects you might want to consider in the design of your fingertips. As I said, my analysis is more oriented to Robotiq products, but these design tips can be transferred to other brands as well. To have more information on the Robotiq 2-Finger 85 Adaptive Gripper for applications such as machine tending, assembly, and pick and place, make sure to follow the link below.






Leave a comment