

In this video of the Robotiq Support How-To video series, you’ll learn how to use the object detection feature of the Robotiq Grippers to enhance your robotic applications. You’ll also find more support videos on Robotiq TV.
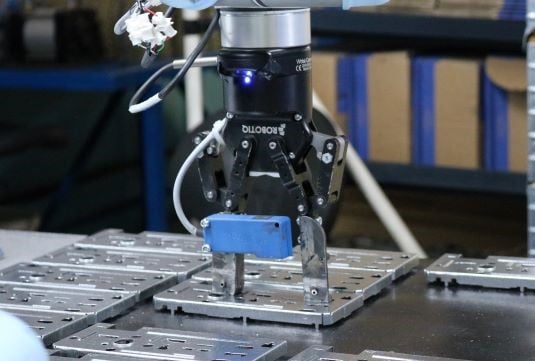
The object detection feature allows you to get a feedback when an object is detected by the Gripper. Available whether in opening or closing mode, this feature can be used to inform your operator to feed the parts when they are missing or to attempt another part pick when the first one fails.
Before starting, you must know that the instructions below apply to the 2-Finger Gripper as well as the 3-Finger Gripper. In this example, we use a Universal Robot since we offer a prebuilt high level function package, but the same logic applies with any other robot except that you will need to define your high level functions yourself.
This is a built-in function of the Gripper that is always accessible. This function monitors the motor current, so when a part is grasped, the current will spike and the object detection feature will turn true.
Normally, you need to read this status inside the Gripper registers.

However, with Universal Robots, you can use the object detection functions.
Here is how to add the object detection feature to your Universal Robots program:
- Open the Gripper package advanced_template.urp (Program Robot ->Load Program -> robotiq_2f_gripper_programs ->advanced_template.urp)
- Insert an If statement where you want the object detection status to update. (Structure -> Advanced -> If...else)
- Insert the object detection function. (Command -> rq_is_object_detected())
If an object is detected, the program will go on the next instruction like a text pop up or a re-grasping if the object wasn’t detect.

To know more about the object detection feature, visit support.robotiq.com.





Leave a comment