

Robotiq is a spin-off from the Laval University Robotics Lab. At the time, the 3 co-founders were not quite sure that converting a research project into real industrial product would work out. But several years later, I think we can say they have succeeded in making the transition. As we just celebrated our company’s 7th anniversary, we thought it would be great to checkout some flashbacks of the 3-Finger Adaptive Gripper.
It all started with...
It all started with one simple finger. A cardboard finger that was able to adapt itself to different situations. In other words, depending on where the pressure point was applied, the finger reacted differently. Based on a human finger, the cardboard finger developed at Laval University made pretty much the same motions as a human finger which is: flexible when closing, being straight when open. At that time, the lab was simply developing mechanisms and was not completely into robotic applications. So the finger was developed, but wasn't actually attached to anything yet.

The first Gripper
It was only a couple years later that the first Adaptive Gripper, called MARS (Main Articulé Robuste Sous-actionnée), was designed and assembled. This gripper was gigantic (way bigger than a human hand). It was designed to be fully adaptive and had 3 independently rotating fingers. This meant that a lot of different objects could be grasped. However, even if it was versatile, it wasn't very tough. Perhaps, it was following Isaac Asimov’s, 1st Rule of Robotics, “A robot may not injure a human being or, through inaction, allow a human being to come to harm”. The hand was manufactured in less than optimal materials and was not mature enough to be used in any kind of real industrial application. It was more of a proof of concept.

Eh, Hi SARAH!
With a couple of iterations, MARS became SARAH (Self Adaptive Robot Auxiliary Hand) and made a bigger leap in the direction of industrial applications. SARAH was made out of aluminum parts and was built tough. It was actioned by electrical and air pressure principles that still allowed the 3 fingers to rotate and to close. The SARAH gripper was a proof of concept for the Canadarm (Dextre) of the International Space Station (ISS). Unfortunately due to technical incompatibilities, this model was not chosen by the Canadian Space Agency to fly on the space shuttle. But a second version of SARAH was manufactured and was used in the UK for radioactive debris removal.

SARAH ALLAIRE
As the grippers that were being produced by the lab were kind of big (let's say huge is not really an understatement) it was difficult to carry them around to make presentations. This is why a trainee at the lab (who is now CTO at Robotiq, Jean-Philippe Jobin) made the choice to create a smaller more portable gripper that could fit into a suitcase. The gripper worked with air pressure (paintball cartridges actually). So this was much lighter than the original versions and could easily be transported for demonstration purposes. The gripper was 3D printed and had the same flexibility as its predecessors, but since it was printed in plastic at the time, you can imagine that it was weaker and more fragile than one made out of metal or composites. A fun aside: the name of the gripper was SARAH ALLAIRE, which is a French last name and also means ''using air''. Why do researchers always try to use catchy names for their projects???

Doing the heavy lifting
So it is at this point, that the adventure really begins. The moment where SARAH came out of the lab and where it tried to make its way into the industrial marketplace. The co-founders Samuel Bouchard, Jean-Philippe Jobin and Vincent Duchaine then transferred their office from the university lab to a small office located in a neighborhood near Québec City. And Robotiq was born. With a couple of iterations (still and always iterations) a first proof of concept was given to the Canadian Forces to do demining. The concept was correct in terms of flexibility, but as you can imagine, was not robust enough.

And now...
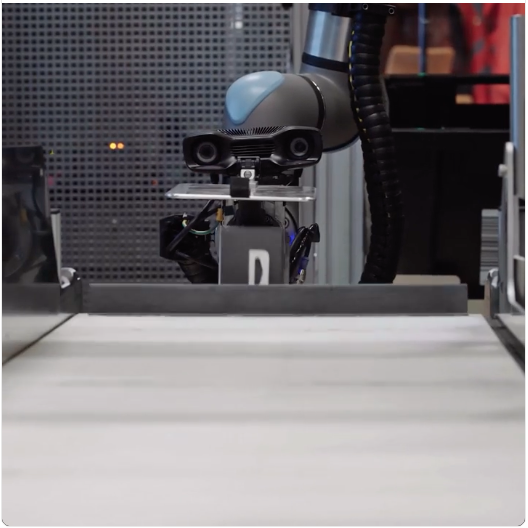
The pace is picking up. Following many opportunities has allowed this start-up to grow at a steady rate. The company saw a potential for a smaller 2-Finger 85 Gripper with all the collaborative robots looking for flexible end of arm tooling. It was also asked to create a heavy 2-Finger 200 Gripper (which it has recently decided to remove from its production line, RIP). The goal of Robotiq has always been to find solutions to problems that are easy to use and flexible for the end-user. Products like Kinetiq Teaching and the FT-150 Force Torque Sensor made their way into the enterprise and are today used by major robotic companies. After many years of hard work Robotiq was introduced this year as one of the TOP 50 Robotic Companies to Watch. Other stimulating projects included the DARPA Robotics Challenge and most recently the Amazon Picking Challenge, where our product was front and center.

It's incredible to realize that all these products, projects and solutions all started from a simple cardboard finger designed in a university lab. The conclusion that I want to underline here is that even if your initial prototype needs some work, who knows where it could lead. As it did for Robotiq, a cardboard finger could lead to a Gripper that opens the door to other end of arm tooling and potentially other interesting robotic products, who knows!
.jpg)




Leave a comment