

 Using robots is often associated with complexity and programming time sinks. With the introduction of collaborative robots, such as Universal Robots, it is now easier to program a robot. But what about robot tools... Are they easy to integrate? Well, with the release of our newest Gripper model we provide built-in programming routines to help you program your UR using a 2-Finger 85 Adaptive Gripper.
Using robots is often associated with complexity and programming time sinks. With the introduction of collaborative robots, such as Universal Robots, it is now easier to program a robot. But what about robot tools... Are they easy to integrate? Well, with the release of our newest Gripper model we provide built-in programming routines to help you program your UR using a 2-Finger 85 Adaptive Gripper.
The Universal Robots interface uses a classic programming method with a user-friendly interface. In fact, the program uses visual shortcuts (blocks) that contain the routines. This means that you place a block (a.k.a. sub-routine) in a sequence and the robot executes these blocks one after the other. These sub-routines can save you a lot of programming time, since you don't have to write them again and again, just insert the block in the program and that's it. This is why we created sub-routines that can be integrated into the robot program to make the 2-Finger 85 Gripper respond within the UR robot program.
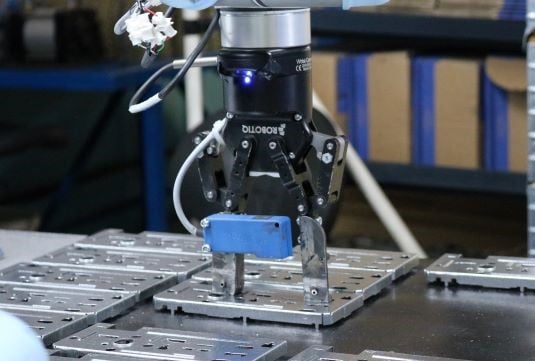
For example, when the robot comes near the object you want to grasp, the gripper can open to a given opening dimension and then close itself once the Gripper is around the part. Once the object has been moved to its next position, the Gripper can be opened so the object can drop. Gravity is wonderful and quite simple, right?.
The coolest part about this, is that you don't have to program it repeatedly. Just put the required blocks in the sequence you are looking for and adjust the position and force settings on the fingers to create your own program. See the following example starting at 2:35 in the video below.
How to...
First of all, you should know that Robotiq provides a Universal Robots kit. This kit includes a 2-Finger 85 Adaptive Gripper and all the accessories needed to install it on a UR. In the kit a USB flash drive contain all the required drivers and files to make the Gripper work normally. This USB stick contains all the sub-routines you will need to run a general pick and place application. By inserting it in the teach pendant, all the required files are installed automatically in the robot controller program. To create a program using the sub-routines you should follow these steps.
-
To load the sub-routines, go to ''robotiq_2f_gripper_programs'' folder and choose the ''low-level_template''.
-
Then you should go into the ''Robot Program'' section and add a ''SubProgram'' instruction.
-
In this sub-routine, go to the ''command'' tab and select ''rq_activate_and_wait''. This operation will 'zero' the Gripper. In other words initialize the Gripper so that it calibrates itself.
-
You can then repeat the process for the other commands. Go to the ''command'' tab and select another sub-routine. The ''rq_close_and_wait'' will close the Gripper and the ''rq_open_and_wait'' will open it.
These are the basic operations that can be done with this Gripper selection of sub-routines. Special settings can be done afterward and because the Gripper is self-actuating it will automatically surround the object you want to grasp when you give it the close command.
These sub-routines will help you reduce the time you spend programming your application and enhance your productivity. The goal is always to make life easier for the end-user. Take a look at the specifications of our new 2-Finger 85 Adaptive Gripper designed specifically around the Universal Robots platform.





Leave a comment